สเตจเคลื่อนที่แบบมือหมุน แกน XYZ , รางสไลด์แบบลูกกลิ้ง

แบรนด์ :
MISUMI
ข้อควรระวัง
- ดาวน์โหลดฟรี! >> Economy Series Catalog ver2023 (TH-EN)_Part09 คลิกที่นี่
รายละเอียดสินค้า
- แกน XYZ แบบแมนนวล, ประเภทรางเลื่อนแบบลูกกลิ้งสลับ, รุ่น E-XYZPG จาก MISUMI
- เป็นสินค้าราคาประหยัด ราคาถูกกว่าสินค้ามาตรฐาน MISUMI
- มี 3 ขนาด 40, 60 และ 80 mm
- สามารถเลือกความสามารถในการรับน้ำหนักได้ตั้งแต่ 9.8 N ถึง 49 N
- การอ่านขั้นต่ำคือ 10 μm
- วัสดุของรุ่น XYZ-Axis Manual Stages E-XYZSG ทำจากอลูมิเนียมอัลลอยด์พร้อมการเคลือบพื้นผิวอะโนไดซ์สีดำ
- สามารถเลือกการปรับเปลี่ยนตำแหน่งปุ่มไมโครมิเตอร์ได้ 4 แบบ, Center (A), Side Up (C), Side Down (CU) และ Reverse (R)
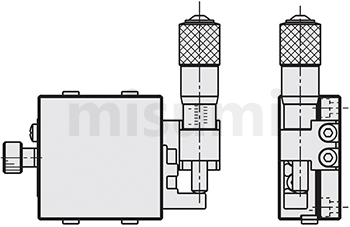
Drawing ระบุขนาดของสเตจเคลื่อนที่แบบมือหมุนแกน XYZ

*A40, A60, A80 เป็นขนาดของรูสกรูที่มีให้เลือกบนแท่นเลื่อน
ตารางสเปคของสเตจเคลื่อนที่แบบมือหมุนแกน XYZ
■ ตารางสเปคของสเตจเคลื่อนที่แบบมือหมุนแกน XYZ
■ การปรับแต่งเพิ่มเติมของสเตจเคลื่อนที่แบบมือหมุนแกน XYZ
| รหัสสินค้า | หน้าสเตจกำหนดตำแหน่ง (มม.) | การเคลื่อนที่ (มม.) | พิกัดน้ำหนัก (N) | ความตรง (µm) | การอ่านขั้นต่ำ (µm) | น้ำหนัก (กิโลกรัม) | |
| ชนิด | ลำดับที่ | ||||||
| E-XYZPG | 40 | 40 × 40 | ±6.5 | 9.8 | ภายใน 20 | 10 | 0.48 |
| 60 | 60 × 60 | 19.6 | 0.95 | ||||
| 80 | 80 × 80 | ±12.5 | 49 | 1.8 | |||
■ การปรับแต่งเพิ่มเติมของสเตจเคลื่อนที่แบบมือหมุนแกน XYZ
| การปรับแต่ง | เปลี่ยนตำแหน่งของลูกบิดไมโครมิเตอร์ | |||
| สเปค | กึ่งกลาง | ด้านบน | ด้านล่าง | ย้อนกลับ |
| รหัส | A | C | CU | R |
ภาพรวมสเปคของสเตจเคลื่อนที่แบบมือหมุนแกน XYZ
■ปริมาณการเคลื่อนที่ของสเตจเคลื่อนที่แบบมือหมุนแกน XYZ
ขนาดที่แสดงในแบบคือเมื่อระยะสโตรกเป็น 0 มม. และระยะที่เคลื่อนที่ไปทางซ้ายและขวาจากจุดนี้คือปริมาณการเคลื่อนที่
■พิกัดน้ำหนักของสเตจเคลื่อนที่แบบมือหมุนแกน XYZ
หากใช้งานเกินพิกัดน้ำหนักที่กำหนด โต๊ะสไลด์อาจเคลื่อนที่ไม่ราบรื่นหรืออาจติดขัดได้ โปรดอ้างอิงค่าความสามารถในการรับโหลดไฟฟ้าเมื่อทำการติดตั้งในแนวนอน และค่า "แนวตั้ง" เมื่อทำการติดตั้งในแนวตั้ง ตามลำดับ
การเคลื่อนที่เชิงเส้น โปรดทราบว่าความแม่นยำอาจต่ำกว่าค่าที่ระบุไว้ในแคตตาล็อกสินค้า หากติดตั้งโต๊ะสไลด์ในแนวตั้งหรือกลับหัว
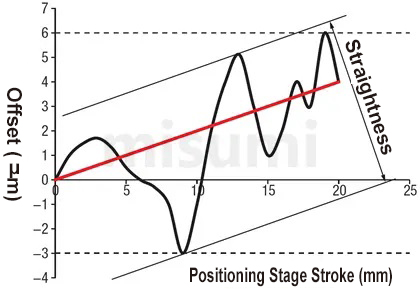
■ความตรงแนว (Straightness) นี้
หมายถึงค่าการเยื้องสูงสุดจากแกนการเคลื่อนที่ในอุดมคติ (เส้นตรงที่เชื่อมระหว่างจุดเริ่มต้นและจุดสิ้นสุด ซึ่งเป็นเส้นสีแดงในรูปด้านล่าง) เส้นสีดำคือเส้นทางการเคลื่อนที่จริงเมื่อขับเคลื่อนสไลด์เทเบิล เคลื่อนที่เต็มระยะสโตรก
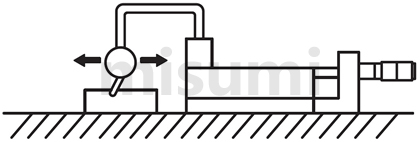
วิธิการตรวจจับ: วางไดอัลอินดิเคเตอร์บนสไลด์เทเบิ้ล วางเข็มชี้บนบล็อกอ้างอิง เลื่อนสไลด์เทเบิ้ลเต็มระยะสโตรก แล้ววัดค่าเลื่อยโซ่สูงสุด หรือก็คือ ความตรง


คุณสมบัติของสเตจเคลื่อนที่แบบมือหมุนแกน XYZ
ราคาต่ำเนื่องจากโครงสร้างที่เรียบง่ายและเทคโนโลยีการผลิตที่พัฒนาขึ้น
วิธีการใช้งานสเตจเคลื่อนที่แบบมือหมุนแกน XYZ
■วิธีการติดตั้งโต๊ะเลื่อนแกน X
เมื่อติดตั้งโต๊ะเลื่อนไปยังฐานรอง/แผ่นรอง จะใช้วิธีการเคลื่อนย้ายโต๊ะเลื่อนเป็นหลัก ดูภาพด้านล่างนี้

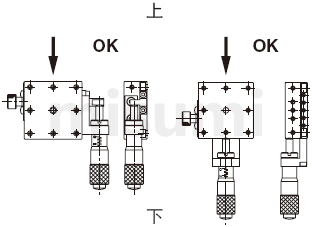
■ ทิศทางการติดตั้งของสเตจเคลื่อนที่แบบมือหมุนแกน XYZ
 เลือกจากการติดตั้งแนวนอน, กลับหัว, แนวนอนด้านข้าง หรือแนวตั้งด้านข้างควรระมัดระวังสำหรับการติดตั้งในรูปแบบอื่น ๆ
เลือกจากการติดตั้งแนวนอน, กลับหัว, แนวนอนด้านข้าง หรือแนวตั้งด้านข้างควรระมัดระวังสำหรับการติดตั้งในรูปแบบอื่น ๆ
ความต้านทานโหลดไฟฟ้าและความแม่นยำจะแตกต่างกันมากขึ้นอยู่กับทิศทางการติดตั้ง
○: ระดับความต้านทานโหลดเท่ากัน
△: ประมาณ 1/3 ของโหลดความต้านทานในแนวนอนเป็นเพียงแนวทางโดยประมาณ และแนะนำให้ใช้โหลดความต้านทานในแนวตั้งตามที่ระบุไว้ในแคตตาล็อกสินค้า
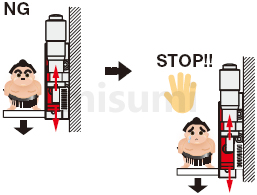
■การใช้โต๊ะสไลด์แกน X ในแนวตั้ง
เมื่อใช้โต๊ะสไลด์แกน X ในแนวตั้ง กรุณาระวังทิศทางการเคลื่อนที่ที่ไม่เป็นไปในทิศทางเดียวกับแรงโน้มถ่วง
เมื่อใช้สไลด์แบบด้ามไมโครมิเตอร์ สไลด์จะถูกดึงกลับด้วยสปริงความตึง หากมีแรงที่มากกว่าโหลดไฟฟ้าของสปริงถูกนำมาใช้ โต๊ะสไลด์อาจตกลงได้
ห้ามใช้งานโหลดไฟฟ้าที่เกินช่วงโหลดไฟฟ้าในแนวตั้ง
เมื่อติดตั้งโต๊ะเลื่อนไปยังฐานรอง/แผ่นรอง จะใช้วิธีการเคลื่อนย้ายโต๊ะเลื่อนเป็นหลัก ดูภาพด้านล่างนี้

■ ทิศทางการติดตั้งของสเตจเคลื่อนที่แบบมือหมุนแกน XYZ
| ลักษณะ |  |  |  |  |
| ทิศทางการติดตั้ง | ขั้นพื้นฐาน | ติดตั้งเพดาน | ติดตั้งด้านข้าง | ติดตั้งในแนวตั้ง |
| ลักษณะคุณสมบัติการต้านทานโหลดไฟฟ้า | ○ | ○ | △ | △ |
เลือกจากการติดตั้งแนวนอน, กลับหัว, แนวนอนด้านข้าง หรือแนวตั้งด้านข้างควรระมัดระวังสำหรับการติดตั้งในรูปแบบอื่น ๆ ความต้านทานโหลดไฟฟ้าและความแม่นยำจะแตกต่างกันมากขึ้นอยู่กับทิศทางการติดตั้ง ○: ระดับความต้านทานโหลดเท่ากัน △: ประมาณ 1/3 ของโหลดความต้านทานในแนวนอนเป็นเพียงแนวทางโดยประมาณ และแนะนำให้ใช้โหลดความต้านทานในแนวตั้งตามที่ระบุไว้ในแคตตาล็อกสินค้า ■การใช้โต๊ะสไลด์แกน X ในแนวตั้ง
เมื่อใช้โต๊ะสไลด์แกน X ในแนวตั้ง กรุณาระวังทิศทางการเคลื่อนที่ที่ไม่เป็นไปในทิศทางเดียวกับแรงโน้มถ่วง
เมื่อใช้สไลด์แบบด้ามไมโครมิเตอร์ สไลด์จะถูกดึงกลับด้วยสปริงความตึง หากมีแรงที่มากกว่าโหลดไฟฟ้าของสปริงถูกนำมาใช้ โต๊ะสไลด์อาจตกลงได้
| การใช้งานที่ไม่ถูกต้อง | การใช้งานที่ถูกต้อง |
 |  |
ห้ามใช้งานโหลดไฟฟ้าที่เกินช่วงโหลดไฟฟ้าในแนวตั้งข้อควรระวังของสเตจเคลื่อนที่แบบมือหมุนแกน XYZ
■ตัวอย่างการใช้งานของสเตจเคลื่อนที่แบบมือหมุนแกน XYZ
ตัวอย่างการใช้งาน: 10 to 50°C, 20 to 70%RH (ไม่เกิดระบบคอนเดนเสท/การนำไอน้ำกลับมาใช้ใหม่)
ตัวอย่างการใช้งานที่แนะนำ: 22±5°C, 20 to 70%RH (ไม่เกิดระบบคอนเดนเสท/การนำไอน้ำกลับมาใช้ใหม่)
■กลไกนำทางของสเตจเคลื่อนที่แบบมือหมุนแกน XYZ
เนื่องจากใช้รางสไลด์แบบลูกกลิ้งเป็นกลไกนำทาง ควรเติมสารหล่อลื่นอย่างเหมาะสมตามสภาพการใช้งาน เพื่อป้องกันอายุการใช้งานของรางสไลด์แบบลูกกลิ้งไม่ให้ลดลงและเสื่อมสภาพจากการลดลงของสารหล่อลื่น
■กลไกการยึดของสเตจเคลื่อนที่แบบมือหมุนแกน XYZ
①กลไกแคลมป์ของโต๊ะสไลด์ถูกยึดด้วยแรงเสียดทานที่เกิดจากสกรูยึด ดังนั้นหากแรงภายนอกมากกว่าแรงเสียดทานของกลไกแคลมป์ โต๊ะสไลด์จะเคลื่อนที่ได้ ผู้ใช้ต้องดำเนินมาตรการที่เหมาะสมระหว่างการใช้งานเพื่อป้องกันไม่ให้พื้นผิวโต๊ะเคลื่อนที่
②แรงดูดจับ หมายถึงค่าของแรงที่ป้องกันไม่ให้โต๊ะสไลด์เคลื่อนที่ในสภาวะที่ถูกแคลมป์ไว้ แรงดูดจับสูงสุดจะแตกต่างกันไปขึ้นอยู่กับแรงบิดขันแน่น ดังนั้นควรเผื่อปัจจัยความปลอดภัยให้เพียงพอในการออกแบบ
■โต๊ะสไลด์ที่ติดตั้งลูกบิดไมโครมิเตอร์บนกลไกการขนย้าย โดยทั่วไปจะเรียกว่ารุ่นมาตรฐานหากมีรูปร่างเหมือนกับภาพด้านล่างนี้ คุณสามารถเลือกได้อย่างอิสระโดยการผสมผสานพื้นที่ติดตั้ง ท่าทางการติดตั้ง และวิธีการใช้งาน อย่างไรก็ตาม มีบางรุ่นที่ไม่สามารถเปลี่ยนตำแหน่งการติดตั้งลูกบิดไมโครมิเตอร์ได้เนื่องจากโครงสร้างของสินค้า
■อาจมีกรณีที่โต๊ะด้านบนและด้านล่างเกิดการบิดเบี้ยวเนื่องจากความแตกต่างของความเรียบของพื้นผิวที่ติดตั้ง การเปลี่ยนรูปของพื้นผิวโต๊ะทำให้เกิดแบ็คลาช การคลายตัวเนื่องจากไม่ได้รับพรีโหลดตามที่กำหนด และการเลื่อนที่ไม่ดีเนื่องจากพรีโหลดมากเกินไป ดังนั้น ขอแนะนำให้รักษาความเรียบของพื้นผิวสำหรับติดตั้งให้อยู่ที่ประมาณ 5 ไมครอน
ตัวอย่างการใช้งาน: 10 to 50°C, 20 to 70%RH (ไม่เกิดระบบคอนเดนเสท/การนำไอน้ำกลับมาใช้ใหม่)
ตัวอย่างการใช้งานที่แนะนำ: 22±5°C, 20 to 70%RH (ไม่เกิดระบบคอนเดนเสท/การนำไอน้ำกลับมาใช้ใหม่)
■กลไกนำทางของสเตจเคลื่อนที่แบบมือหมุนแกน XYZ
เนื่องจากใช้รางสไลด์แบบลูกกลิ้งเป็นกลไกนำทาง ควรเติมสารหล่อลื่นอย่างเหมาะสมตามสภาพการใช้งาน เพื่อป้องกันอายุการใช้งานของรางสไลด์แบบลูกกลิ้งไม่ให้ลดลงและเสื่อมสภาพจากการลดลงของสารหล่อลื่น
■กลไกการยึดของสเตจเคลื่อนที่แบบมือหมุนแกน XYZ
①กลไกแคลมป์ของโต๊ะสไลด์ถูกยึดด้วยแรงเสียดทานที่เกิดจากสกรูยึด ดังนั้นหากแรงภายนอกมากกว่าแรงเสียดทานของกลไกแคลมป์ โต๊ะสไลด์จะเคลื่อนที่ได้ ผู้ใช้ต้องดำเนินมาตรการที่เหมาะสมระหว่างการใช้งานเพื่อป้องกันไม่ให้พื้นผิวโต๊ะเคลื่อนที่
②แรงดูดจับ หมายถึงค่าของแรงที่ป้องกันไม่ให้โต๊ะสไลด์เคลื่อนที่ในสภาวะที่ถูกแคลมป์ไว้ แรงดูดจับสูงสุดจะแตกต่างกันไปขึ้นอยู่กับแรงบิดขันแน่น ดังนั้นควรเผื่อปัจจัยความปลอดภัยให้เพียงพอในการออกแบบ
■โต๊ะสไลด์ที่ติดตั้งลูกบิดไมโครมิเตอร์บนกลไกการขนย้าย โดยทั่วไปจะเรียกว่ารุ่นมาตรฐานหากมีรูปร่างเหมือนกับภาพด้านล่างนี้ คุณสามารถเลือกได้อย่างอิสระโดยการผสมผสานพื้นที่ติดตั้ง ท่าทางการติดตั้ง และวิธีการใช้งาน อย่างไรก็ตาม มีบางรุ่นที่ไม่สามารถเปลี่ยนตำแหน่งการติดตั้งลูกบิดไมโครมิเตอร์ได้เนื่องจากโครงสร้างของสินค้า
■อาจมีกรณีที่โต๊ะด้านบนและด้านล่างเกิดการบิดเบี้ยวเนื่องจากความแตกต่างของความเรียบของพื้นผิวที่ติดตั้ง การเปลี่ยนรูปของพื้นผิวโต๊ะทำให้เกิดแบ็คลาช การคลายตัวเนื่องจากไม่ได้รับพรีโหลดตามที่กำหนด และการเลื่อนที่ไม่ดีเนื่องจากพรีโหลดมากเกินไป ดังนั้น ขอแนะนำให้รักษาความเรียบของพื้นผิวสำหรับติดตั้งให้อยู่ที่ประมาณ 5 ไมครอน
ภาพรวมผลิตภัณฑ์
MISUMI E-XYZPG ซีรีส์ระยะการ การวางตำแหน่ง ประเภท ไกด์ ตลับลูกกลิ้งแบบสลับ คือระยะการ การวางตำแหน่ง ซีรีส์ ความคุ้มค่า สามารถใช้เป็น สเตจกำหนดตำแหน่ง สำหรับการปรับ ตำแหน่ง อย่างง่าย ตัวเครื่อง ทำจาก อะลูมิเนียมอัลลอย เพื่อให้มีน้ำหนักเบา พื้นผิว เป็นสีดำโนไดซ์ ไกด์ ตลับลูกกลิ้งแบบสลับ ใช้สำหรับนำทางซึ่งสามารถตอบสนอง ความแม่นยำ ในการใช้งานที่ต้องการ ราคาลดลงอย่างมากเนื่องจากการผลิตในประเทศจีนและ กระบวนการแปรรูป การตัดแต่งขึ้นรูปด้วยเครื่องจักร ที่ดีขึ้น
คุณสมบัติผลิตภัณฑ์
คุณสมบัติ 1: รอบการผลิตสั้นลง จัดส่งภายใน 5 วันอย่างเร็วที่สุด
คุณสมบัติ 2: ราคาต่ำสามารถทำได้โดยการลดความซับซ้อนของโครงสร้างและปรับปรุง กระบวนการแปรรูป การตัดแต่งขึ้นรูปด้วยเครื่องจักร
คุณสมบัติ 3: มีการดัดแปลงที่หลากหลายเพื่อให้สามารถติดตั้งและใช้งานได้ภายใต้เงื่อนไขที่แตกต่างกัน
คุณสมบัติ 4: ด้วยการปรับปรุง กลไก จับยึด แรงดูดจับ ยึดของระยะการ สเตจกำหนดตำแหน่ง จะมากกว่า กลไก จับยึด รุ่นมาตรฐาน
■ ปริมาณการ การเคลื่อนที่ (ของชิ้นส่วนเครื่องจักร)
ขนาด ดรออิ้ง/ภาพร่างแบบ แค็ตตาล็อกคือ สถานะ ของ การเคลื่อนที่ (ของชิ้นส่วนเครื่องจักร) 0 มม. และการใช้สิ่งนี้เป็นข้อมูลอ้างอิง ระยะทางที่เคลื่อนที่ในทิศทางซ้ายและขวาคือปริมาณการ การเคลื่อนที่ (ของชิ้นส่วนเครื่องจักร)
■ พิกัดน้ำหนัก
คือแรงใน N ที่ระยะการ สเตจกำหนดตำแหน่ง สามารถรับได้เมื่อจุดศูนย์ถ่วงของ ชิ้นงาน อยู่ตรงกลางของระยะการ สเตจกำหนดตำแหน่ง หากใช้เกิน พิกัดน้ำหนัก ระยะการ สเตจกำหนดตำแหน่ง อาจเคลื่อนที่ไม่ถูกต้องหรือติดขัด อ้างอิงถึงค่าของ "แนวนอน" และ "แนวตั้ง" สำหรับค่าความต้านทาน โหลดไฟฟ้า สำหรับการติดตั้งในแนวนอนและแนวตั้งตามลำดับ โปรดทราบว่าเมื่อติดตั้ง สเตจกำหนดตำแหน่ง ระบบเคลื่อนที่แนวเส้นตรง ในแนวตั้งหรือกลับหัว ความแม่นยำ อาจน้อยกว่า ค่า ที่ระบุในแค็ตตาล็อก
■ ความตรง
ค่า ออฟเซ็ท สูงสุดที่สัมพันธ์กับ แกน การเคลื่อนที่ในอุดมคติ (เส้นที่เชื่อมต่อจุดเริ่มต้นและจุดสิ้นสุดจะแสดงเป็นเส้นสีแดงในรูปด้านล่าง เส้นสีดำคือเส้นทางการเคลื่อนที่จริง) เมื่อระยะการ สเตจกำหนดตำแหน่ง เคลื่อนที่เต็ม สโตรค/ระยะเคลื่อนที่ วิธิการตรวจจับ: วาง ไมโครมิเตอร์ บน สเตจกำหนดตำแหน่ง โดยให้ตัวชี้แตะกับ บล็อคอ้างอิง ปล่อยให้ สเตจกำหนดตำแหน่ง เคลื่อนที่เต็ม สโตรค/ระยะเคลื่อนที่ และวัดการ เลื่อยโซ่ สูงสุด ซึ่งก็คือความตรง
คุณสมบัติ 2: ราคาต่ำสามารถทำได้โดยการลดความซับซ้อนของโครงสร้างและปรับปรุง กระบวนการแปรรูป การตัดแต่งขึ้นรูปด้วยเครื่องจักร
คุณสมบัติ 3: มีการดัดแปลงที่หลากหลายเพื่อให้สามารถติดตั้งและใช้งานได้ภายใต้เงื่อนไขที่แตกต่างกัน
คุณสมบัติ 4: ด้วยการปรับปรุง กลไก จับยึด แรงดูดจับ ยึดของระยะการ สเตจกำหนดตำแหน่ง จะมากกว่า กลไก จับยึด รุ่นมาตรฐาน
ภาพรวมของสเปค
| รุ่น |  วัสดุ วัสดุ |  กระบวนการชุบผิว กระบวนการชุบผิว | การเคลื่อนไหว (มม.) | พิกัดน้ำหนัก (N) | ความตรง |
| E-XYZPG | อลูมิเนียมอัลลอย | อโนไดซ์สีดำ | ±6.5 to ±12.5 | 9.8 to 49 | ภายใน 10µm |
■ ปริมาณการ การเคลื่อนที่ (ของชิ้นส่วนเครื่องจักร)
ขนาด ดรออิ้ง/ภาพร่างแบบ แค็ตตาล็อกคือ สถานะ ของ การเคลื่อนที่ (ของชิ้นส่วนเครื่องจักร) 0 มม. และการใช้สิ่งนี้เป็นข้อมูลอ้างอิง ระยะทางที่เคลื่อนที่ในทิศทางซ้ายและขวาคือปริมาณการ การเคลื่อนที่ (ของชิ้นส่วนเครื่องจักร)
■ พิกัดน้ำหนัก
คือแรงใน N ที่ระยะการ สเตจกำหนดตำแหน่ง สามารถรับได้เมื่อจุดศูนย์ถ่วงของ ชิ้นงาน อยู่ตรงกลางของระยะการ สเตจกำหนดตำแหน่ง หากใช้เกิน พิกัดน้ำหนัก ระยะการ สเตจกำหนดตำแหน่ง อาจเคลื่อนที่ไม่ถูกต้องหรือติดขัด อ้างอิงถึงค่าของ "แนวนอน" และ "แนวตั้ง" สำหรับค่าความต้านทาน โหลดไฟฟ้า สำหรับการติดตั้งในแนวนอนและแนวตั้งตามลำดับ โปรดทราบว่าเมื่อติดตั้ง สเตจกำหนดตำแหน่ง ระบบเคลื่อนที่แนวเส้นตรง ในแนวตั้งหรือกลับหัว ความแม่นยำ อาจน้อยกว่า ค่า ที่ระบุในแค็ตตาล็อก
■ ความตรง
ค่า ออฟเซ็ท สูงสุดที่สัมพันธ์กับ แกน การเคลื่อนที่ในอุดมคติ (เส้นที่เชื่อมต่อจุดเริ่มต้นและจุดสิ้นสุดจะแสดงเป็นเส้นสีแดงในรูปด้านล่าง เส้นสีดำคือเส้นทางการเคลื่อนที่จริง) เมื่อระยะการ สเตจกำหนดตำแหน่ง เคลื่อนที่เต็ม สโตรค/ระยะเคลื่อนที่ วิธิการตรวจจับ: วาง ไมโครมิเตอร์ บน สเตจกำหนดตำแหน่ง โดยให้ตัวชี้แตะกับ บล็อคอ้างอิง ปล่อยให้ สเตจกำหนดตำแหน่ง เคลื่อนที่เต็ม สโตรค/ระยะเคลื่อนที่ และวัดการ เลื่อยโซ่ สูงสุด ซึ่งก็คือความตรง


วิธีการใช้งาน
■ วิธีการติดตั้ง สเตจกำหนดตำแหน่ง แกน X
เมื่อติดตั้งแท่น สเตจกำหนดตำแหน่ง เข้ากับ ฐานรอง/แผ่นรอง โดยทั่วไปจะติดตั้งโดยการเลื่อน พื้นผิว แท่น สเตจกำหนดตำแหน่ง โปรดดูแผนภาพต่อไปนี้
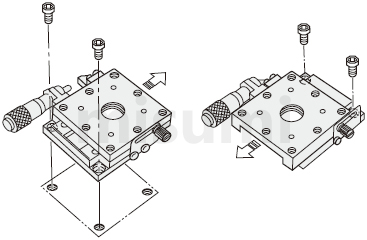
 แผนภาพด้านบนนี้ใช้เพื่อจุดประสงค์ในการสาธิตเท่านั้น โปรดดูแคตตาล็อกแต่ละรายการหรือข้อมูล 3 มิติสำหรับรูปร่างและ สเปค ของระยะการ สเตจกำหนดตำแหน่ง
แผนภาพด้านบนนี้ใช้เพื่อจุดประสงค์ในการสาธิตเท่านั้น โปรดดูแคตตาล็อกแต่ละรายการหรือข้อมูล 3 มิติสำหรับรูปร่างและ สเปค ของระยะการ สเตจกำหนดตำแหน่ง
■ ท่าทางการติดตั้ง
มีตัวเลือกการติดตั้งแนวนอน, กลับหัว, แนวนอนติดตั้งด้านข้างหรือแนวตั้งติดตั้งด้านข้าง วิธีการติดตั้งอื่น ๆ ควรให้ความสนใจมากกว่านี้
ความสามารถในการรับ พิกัดน้ำหนัก และ ความแม่นยำ จะเปลี่ยนแปลงอย่างมากขึ้นอยู่กับท่าทางการติดตั้ง
○: เหมือนกับความสามารถในการรับ พิกัดน้ำหนัก ในแนวนอน
△: ประมาณ 1/3 ของความสามารถในการรับ พิกัดน้ำหนัก ในแนวนอนเป็น มาตรฐาน โดยประมาณ หากแคตตาล็อกมีความสามารถในการรับ พิกัดน้ำหนัก ในแนวตั้ง ควรให้ความสำคัญเป็นอันดับแรก
■ การใช้ สเตจกำหนดตำแหน่ง แกน X ตั้ง
เมื่อใช้แท่น สเตจกำหนดตำแหน่ง แกน X แนวตั้ง ให้ใส่ใจกับทิศทางการป้อน ซึ่งไม่ควรอยู่ในทิศทางเดียวกับแรงโน้มถ่วง
เมื่อใช้ สเตจกำหนดตำแหน่ง ชนิด ลูกบิด ไมโครมิเตอร์ โปรดทราบว่าระยะ สเตจกำหนดตำแหน่ง จะถูกรีเซ็ตโดย สปริง ยืด ถ้าแรงที่ใช้มากกว่า สปริง โหลดไฟฟ้า พื้นผิว สเตจกำหนดตำแหน่ง อาจตกลงมา สำหรับโอกาสดังกล่าว การแก้ไขสามารถใช้เป็น สารละลาย ได้
หลีกเลี่ยงการบรรทุกที่เกินระยะ โหลดไฟฟ้า ในแนวดิ่ง
เมื่อติดตั้งแท่น สเตจกำหนดตำแหน่ง เข้ากับ ฐานรอง/แผ่นรอง โดยทั่วไปจะติดตั้งโดยการเลื่อน พื้นผิว แท่น สเตจกำหนดตำแหน่ง โปรดดูแผนภาพต่อไปนี้

 แผนภาพด้านบนนี้ใช้เพื่อจุดประสงค์ในการสาธิตเท่านั้น โปรดดูแคตตาล็อกแต่ละรายการหรือข้อมูล 3 มิติสำหรับรูปร่างและ สเปค ของระยะการ สเตจกำหนดตำแหน่ง
แผนภาพด้านบนนี้ใช้เพื่อจุดประสงค์ในการสาธิตเท่านั้น โปรดดูแคตตาล็อกแต่ละรายการหรือข้อมูล 3 มิติสำหรับรูปร่างและ สเปค ของระยะการ สเตจกำหนดตำแหน่ง■ ท่าทางการติดตั้ง
| แผนภาพ |  |  |  |  |
| ท่าทางการติดตั้ง | ตามแนวนอน | ฤๅษี | แนวนอนติดตั้งด้านข้าง | ติดตั้งด้านข้างในแนวตั้ง |
| ลักษณะต้านทาน โหลดไฟฟ้า | ○ | ○ | △ | △ |
มีตัวเลือกการติดตั้งแนวนอน, กลับหัว, แนวนอนติดตั้งด้านข้างหรือแนวตั้งติดตั้งด้านข้าง วิธีการติดตั้งอื่น ๆ ควรให้ความสนใจมากกว่านี้ความสามารถในการรับ พิกัดน้ำหนัก และ ความแม่นยำ จะเปลี่ยนแปลงอย่างมากขึ้นอยู่กับท่าทางการติดตั้ง○: เหมือนกับความสามารถในการรับ พิกัดน้ำหนัก ในแนวนอน△: ประมาณ 1/3 ของความสามารถในการรับ พิกัดน้ำหนัก ในแนวนอนเป็น มาตรฐาน โดยประมาณ หากแคตตาล็อกมีความสามารถในการรับ พิกัดน้ำหนัก ในแนวตั้ง ควรให้ความสำคัญเป็นอันดับแรก■ การใช้ สเตจกำหนดตำแหน่ง แกน X ตั้ง
เมื่อใช้แท่น สเตจกำหนดตำแหน่ง แกน X แนวตั้ง ให้ใส่ใจกับทิศทางการป้อน ซึ่งไม่ควรอยู่ในทิศทางเดียวกับแรงโน้มถ่วง
เมื่อใช้ สเตจกำหนดตำแหน่ง ชนิด ลูกบิด ไมโครมิเตอร์ โปรดทราบว่าระยะ สเตจกำหนดตำแหน่ง จะถูกรีเซ็ตโดย สปริง ยืด ถ้าแรงที่ใช้มากกว่า สปริง โหลดไฟฟ้า พื้นผิว สเตจกำหนดตำแหน่ง อาจตกลงมา สำหรับโอกาสดังกล่าว การแก้ไขสามารถใช้เป็น สารละลาย ได้
| วิธีการใช้งานที่ไม่ถูกต้อง | วิธีการใช้งานที่ถูกต้อง |
| (โดยปกติ) หากแรงที่ใช้เกิน แรงดึงที่รับได้ ของ สปริง พื้นผิว สเตจกำหนดตำแหน่ง อาจหลุดออกเนื่องจากไม่สามารถ อุปกรณ์รองรับท่อ น้ำหนักได้ | หลังจากเลือกการ การปรับแต่งเพิ่มเติม ตำแหน่ง ลูกบิด ไมโครมิเตอร์ แล้ว พื้นผิว สเตจกำหนดตำแหน่ง จะไม่ตกแม้ใช้งานในแนวตั้ง |
 |  |
หลีกเลี่ยงการบรรทุกที่เกินระยะ โหลดไฟฟ้า ในแนวดิ่งตัวอย่างการใช้งาน
ชื่อ กลไก: การปรับ ตำแหน่ง การใช้งาน กาว สำลีก้าน
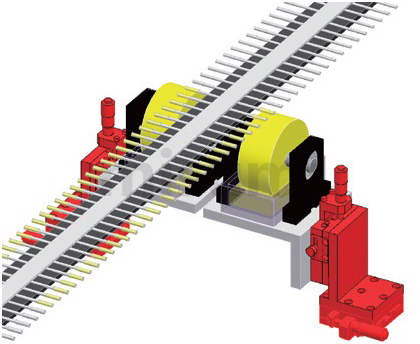

ตัวอย่างการใช้งาน
| เครื่องใช้ไฟฟ้า/ เครื่องใช้ บ้าน | อุตสาหกรรมยานยนต์ | ทางการแพทย์ | ||
 |  |  | ||
| โทรศัพท์สมาร์ท | เซมิคอนดักเตอร์ | แบตเตอรี่ลิเธียม | ||
 |  |  |
ข้อควรระวัง
■ อุณหภูมิใช้งาน การทำงานและสภาพแวดล้อม
สภาพแวดล้อมการใช้งาน แนะนำ: 10 to 50°C, 20 to 70%RH (ไม่มีการควบแน่น)
สภาพแวดล้อมการรับประกัน ความแม่นยำ: 22±5°C, 20 to 70%RH (ไม่มีการควบแน่น)
■ กลไกการนำทางเคลื่อนที่
สเตจกำหนดตำแหน่ง นี้ใช้ ไกด์ ตลับลูกกลิ้งแบบสลับ เป็น กลไกการนำทางเคลื่อนที่ โปรดเติม สารหล่อลื่น ในเวลาที่เหมาะสมตามเงื่อนไขการใช้งาน เพื่อป้องกันไม่ให้อายุการใช้งานของ ไกด์ ตลับลูกกลิ้งแบบสลับ สั้นลงเนื่องจากการลดลงของ สารหล่อลื่น และอายุที่มากขึ้น
■ กลไก หนีบ
(1) กลไก ยึดของระยะการ สเตจกำหนดตำแหน่ง ได้ ยึดอยู่กับที่ โดยแรงเสียดทานที่เกิดจาก สกรู ยึด ดังนั้นเมื่อแรงภายนอกที่ใช้เกินแรงเสียดทานของส่วน กลไก จับยึด มันจะทำให้ระยะการ สเตจกำหนดตำแหน่ง เคลื่อนที่ ผู้ใช้ควรใช้มาตรการที่เหมาะสมเพื่อหลีกเลี่ยงการเคลื่อนที่ของ พื้นผิว สเตจกำหนดตำแหน่ง ระหว่างการใช้งาน หากต้องการเสริมแรงจับยึด สามารถเลือกหนีบ แผ่นดิสก์ หรือหนีบตรงกันข้ามได้
(2) แรงดูดจับ คือ ค่า ของแรงที่ป้องกันไม่ให้ พื้นผิว สเตจกำหนดตำแหน่ง เคลื่อนที่ในสภาพที่ถูกยึด เนื่องจาก แรงดูดจับ สูงสุดจะแปรผันตาม แรงบิดขันแน่น โปรดตรวจสอบให้แน่ใจว่ามี ปัจจัย ด้านความปลอดภัยเพียงพอเมื่อออกแบบ
■ กลไก ฟีด
รูปทรง ของ สเตจกำหนดตำแหน่ง ที่มี ลูกบิด ไมโครมิเตอร์ ติดตั้งอยู่ดังแสดงในรูปด้านล่าง โดยทั่วไปเรียกว่า รุ่นมาตรฐาน สามารถเลือกได้อย่างอิสระโดยการรวมพื้นที่การติดตั้ง ท่าทางการติดตั้ง และวิธีการใช้งานเข้าด้วยกัน อย่างไรก็ตาม เนื่องจากโครงสร้างของ ผลิตภัณฑ์ มีบางรุ่นที่ไม่สามารถเปลี่ยน ตำแหน่ง การติดตั้ง ลูกบิด ไมโครมิเตอร์ ได้ สำหรับรายละเอียด โปรดดูที่ [การปรับแต่งเพิ่มเติม] ที่ด้านล่างของแต่ละหน้า ผลิตภัณฑ์
■ ความเรียบของ พื้นผิว ติดตั้ง
พื้น พื้นผิว แท่น สเตจกำหนดตำแหน่ง ด้านบนและด้านล่างอาจผิดรูปเนื่องจากความเรียบที่แตกต่างกันของ พื้นผิว ติดตั้ง การเสียรูปของ พื้นผิว ส สเตจกำหนดตำแหน่ง อาจส่งผลให้เกิดช่องว่าง การหลวมเนื่องจากความล้มเหลวในการรับ พรีโหลด ที่ระบุ หรือการเลื่อนที่ไม่ดีเนื่องจาก พรีโหลด มากเกินไป ดังนั้น ขอแนะนำให้รักษาความเรียบของ พื้นผิว ติดตั้งไว้ที่ประมาณ 5 ไมครอน
สภาพแวดล้อมการใช้งาน แนะนำ: 10 to 50°C, 20 to 70%RH (ไม่มีการควบแน่น)
สภาพแวดล้อมการรับประกัน ความแม่นยำ: 22±5°C, 20 to 70%RH (ไม่มีการควบแน่น)
■ กลไกการนำทางเคลื่อนที่
สเตจกำหนดตำแหน่ง นี้ใช้ ไกด์ ตลับลูกกลิ้งแบบสลับ เป็น กลไกการนำทางเคลื่อนที่ โปรดเติม สารหล่อลื่น ในเวลาที่เหมาะสมตามเงื่อนไขการใช้งาน เพื่อป้องกันไม่ให้อายุการใช้งานของ ไกด์ ตลับลูกกลิ้งแบบสลับ สั้นลงเนื่องจากการลดลงของ สารหล่อลื่น และอายุที่มากขึ้น
■ กลไก หนีบ
(1) กลไก ยึดของระยะการ สเตจกำหนดตำแหน่ง ได้ ยึดอยู่กับที่ โดยแรงเสียดทานที่เกิดจาก สกรู ยึด ดังนั้นเมื่อแรงภายนอกที่ใช้เกินแรงเสียดทานของส่วน กลไก จับยึด มันจะทำให้ระยะการ สเตจกำหนดตำแหน่ง เคลื่อนที่ ผู้ใช้ควรใช้มาตรการที่เหมาะสมเพื่อหลีกเลี่ยงการเคลื่อนที่ของ พื้นผิว สเตจกำหนดตำแหน่ง ระหว่างการใช้งาน หากต้องการเสริมแรงจับยึด สามารถเลือกหนีบ แผ่นดิสก์ หรือหนีบตรงกันข้ามได้
(2) แรงดูดจับ คือ ค่า ของแรงที่ป้องกันไม่ให้ พื้นผิว สเตจกำหนดตำแหน่ง เคลื่อนที่ในสภาพที่ถูกยึด เนื่องจาก แรงดูดจับ สูงสุดจะแปรผันตาม แรงบิดขันแน่น โปรดตรวจสอบให้แน่ใจว่ามี ปัจจัย ด้านความปลอดภัยเพียงพอเมื่อออกแบบ
■ กลไก ฟีด
รูปทรง ของ สเตจกำหนดตำแหน่ง ที่มี ลูกบิด ไมโครมิเตอร์ ติดตั้งอยู่ดังแสดงในรูปด้านล่าง โดยทั่วไปเรียกว่า รุ่นมาตรฐาน สามารถเลือกได้อย่างอิสระโดยการรวมพื้นที่การติดตั้ง ท่าทางการติดตั้ง และวิธีการใช้งานเข้าด้วยกัน อย่างไรก็ตาม เนื่องจากโครงสร้างของ ผลิตภัณฑ์ มีบางรุ่นที่ไม่สามารถเปลี่ยน ตำแหน่ง การติดตั้ง ลูกบิด ไมโครมิเตอร์ ได้ สำหรับรายละเอียด โปรดดูที่ [การปรับแต่งเพิ่มเติม] ที่ด้านล่างของแต่ละหน้า ผลิตภัณฑ์

■ ความเรียบของ พื้นผิว ติดตั้ง
พื้น พื้นผิว แท่น สเตจกำหนดตำแหน่ง ด้านบนและด้านล่างอาจผิดรูปเนื่องจากความเรียบที่แตกต่างกันของ พื้นผิว ติดตั้ง การเสียรูปของ พื้นผิว ส สเตจกำหนดตำแหน่ง อาจส่งผลให้เกิดช่องว่าง การหลวมเนื่องจากความล้มเหลวในการรับ พรีโหลด ที่ระบุ หรือการเลื่อนที่ไม่ดีเนื่องจาก พรีโหลด มากเกินไป ดังนั้น ขอแนะนำให้รักษาความเรียบของ พื้นผิว ติดตั้งไว้ที่ประมาณ 5 ไมครอน
สินค้าที่เกี่ยวข้อง
| ขั้นตอนการ การวางตำแหน่ง ด้วยมอเตอร์ แกน X | ระยะ การวางตำแหน่ง ด้วยมอเตอร์ แกน XY | ระยะ การวางตำแหน่ง ด้วยมอเตอร์ แกน Z | ||
 |  |  | ||
| รุ่น ทั่วไป: C-XMBS420-L-A-2 | รุ่น ทั่วไป: C-XYMBS420-L-A-2 | รุ่น ทั่วไป: C-ZMBS420-L-A-2 | ||
| ข้อดี: ราคาถูก จัดส่งรวดเร็ว | ข้อดี: ราคาถูก จัดส่งรวดเร็ว | ข้อดี: ราคาถูก จัดส่งรวดเร็ว |