สเตจกำหนดตำแหน่งแบบมอเตอร์ขับเคลื่อน XY-แกน ชนิดรางลูกปืนเชิงเส้น ความสามารถในการทวนซ้ำของการวางตำแหน่ง ±5μ

แบรนด์ :
MISUMI
ข้อควรระวัง
- ดาวน์โหลดฟรี! >> แคตตาล็อกซีรี่ส์ ความคุ้มค่า ver2023 (TH-EN)_Part09 คลิกที่นี่
รายละเอียดสินค้า
・ ประเภทผลิตภัณฑ์: สเตจกำหนดตำแหน่งด้วยมอเตอร์แกน XY ซีรีส์ C-XYMBS
・ ขนาดโต๊ะ [mm]: 40x40, 60x60, 60x100, 80x80
・ จังหวะการเคลื่อนที่ของโต๊ะ [mm]: 18, 28, 43, 20
・ ความยาวสายเคเบิล [ม.]: 2, 4
・ โครงสร้างการเคลื่อนที่: บอลสกรู Φ6, สายนำ 1 mm พร้อมลิเนียร์บอลไกด์
・ ความเร็วในการเคลื่อนที่สูงสุด: 10 mm/วินาที
・ความแม่นยำของตำแหน่งทางเดียว:ภายใน20μm
・ ความแม่นยำของตำแหน่งซ้ำ: ภายใน ±5.0μm
・ นี่คือสินค้าราคาประหยัด ซึ่งราคาถูกกว่าสินค้ามาตรฐานของ MISUMI
ภาพรวมผลิตภัณฑ์
ไกด์เทเบิ้ลไฟฟ้ารุ่น MISUMI C-XYMBS เป็นไกด์เทเบิ้ลแบบประหยัดที่มาพร้อมกับสเต็ปปิ้งมอเตอร์สองเฟส สามารถใช้เป็นแท็บสไลด์สำหรับปรับตำแหน่งในอุปกรณ์อัตโนมัติได้ ตัวเครื่องผลิตจากเหล็ก 20Cr พร้อมชุบผิวนิกเกิลแบบเคมี ซึ่งให้ทั้งความแข็งเกร็งสูงและทนต่อสนิมได้อย่างยอดเยี่ยม ใช้บอลไกด์ลิเนียร์แบบรวมเป็นตัวนำทาง ซึ่งสามารถตอบสนองความแม่นยำที่ต้องการสำหรับการใช้งาน ด้วยการทำให้โครงสร้างเรียบง่ายขึ้นและปรับปรุงกระบวนการผลิต ทำให้ราคาถูกลงอย่างมาก
ดรออิ้งบอกขนาด

 แผนภาพข้างต้นแสดงสถานการณ์เมื่อเลือกแผ่นปิดฝาแบบ L สำหรับขนาดโดยละเอียดเมื่อเลือกแผ่นปิดฝาแบบ R โปรดดูข้อมูล CADในแผนภาพข้างบน เมื่อแผ่นปิด 820 เป็นแบบ L เพลาอยู่ด้านบนจะเป็นแบบ L และเพลาด้านล่างจะเป็นแบบ R เมื่อแผ่นปิด 820 เป็นแบบ R เพลาอยู่ด้านบนจะเป็นแบบ R และเพลาด้านล่างจะเป็นแบบ Lความยาวของสายต่อคอนเนคเตอร์ฝั่งมอเตอร์จะแตกต่างกันขึ้นอยู่กับรุ่น โปรดดูรายละเอียดในผลิตภัณฑ์จริงรุ่นที่ซื้อประกอบด้วยตัวเครื่องแท็บสไลด์ ไดรเวอร์ที่สอดคล้องกัน และสายเคเบิล ไม่จำเป็นต้องซื้อเพิ่มเติม
แผนภาพข้างต้นแสดงสถานการณ์เมื่อเลือกแผ่นปิดฝาแบบ L สำหรับขนาดโดยละเอียดเมื่อเลือกแผ่นปิดฝาแบบ R โปรดดูข้อมูล CADในแผนภาพข้างบน เมื่อแผ่นปิด 820 เป็นแบบ L เพลาอยู่ด้านบนจะเป็นแบบ L และเพลาด้านล่างจะเป็นแบบ R เมื่อแผ่นปิด 820 เป็นแบบ R เพลาอยู่ด้านบนจะเป็นแบบ R และเพลาด้านล่างจะเป็นแบบ Lความยาวของสายต่อคอนเนคเตอร์ฝั่งมอเตอร์จะแตกต่างกันขึ้นอยู่กับรุ่น โปรดดูรายละเอียดในผลิตภัณฑ์จริงรุ่นที่ซื้อประกอบด้วยตัวเครื่องแท็บสไลด์ ไดรเวอร์ที่สอดคล้องกัน และสายเคเบิล ไม่จำเป็นต้องซื้อเพิ่มเติมเหล็กฉากสำหรับยึดสเต็ปปิ้งมอเตอร์
C-XYMBS□□□-R-S3

ตาราง วัสดุ
 วัสดุ วัสดุ |  กระบวนการเตรียมผิว กระบวนการเตรียมผิว |  อุปกรณ์เสริม อุปกรณ์เสริม |
| เหล็กกล้าผสม | ชุบนิกเกิ้ลแบบไม่ใช้ไฟฟ้า | จำนวนสลักกำหนดตำแหน่ง: 4 |
ตารางข้อมูลจำเพาะ
| ชนิด | ความยาวของไกด์เทเบิ้ล (มม.) |  ตำแหน่งแผ่นฝาปิด ตำแหน่งแผ่นฝาปิด |  มอเตอร์ มอเตอร์ |  ชุดขับมอเตอร์ ชุดขับมอเตอร์ |  ความยาวสายไฟ (ม.) ความยาวสายไฟ (ม.) | สเปค เชิงกล | ||||
 ชนิด ชนิด |  ชนิด ชนิด | ระยะทางในการเคลื่อนที่ (มม.) | พิกัดน้ำหนัก (N) | น้ำหนัก (กก.) | ||||||
| C-XYMBS | แกน XY | 420 | 40 × 40 | L | เว้นว่าง (พร้อมสเต็ปปิ้งมอเตอร์ มาตรฐาน) S3 (พร้อมเหล็กฉากสำหรับยึดสเต็ปปิ้งมอเตอร์ ขนาดเฟรม 28) | A (วงจรขับพัลส์แกนเดียว) N (ไม่มีชุดขับมอเตอร์) E (ชุดขับมอเตอร์ต่อเชื่อมแบบบัส EtherCat) | 2 4 | 18 | 94 | 0.8 |
| R | ||||||||||
| 630 | 60 × 60 | L | 28 | 92 | 1.2 | |||||
| R | ||||||||||
| 650 | 60 × 100 | L | 43 | 90 | 1.6 | |||||
| R | ||||||||||
| 820 | 80 × 80 | L | 20 | 109.0 | 2.2 | |||||
| R | ||||||||||
| ชนิด | สเปคความแม่นยำ*1 | เซนเซอร์ | ||||||||
| ความละเอียด (พัลส์) | ความเร็ว สูงสุด | ความแม่นยำในการวางตำแหน่ง เฉพาะทิศทาง | ความแม่นยำในการวางตำแหน่ง ซ้ำ ๆ | การเคลื่อนที่ ที่ไม่เกิดผล | ความขนาน | ความตรง ของการเคลื่อนที่ | ความขนาน ของการเคลื่อนที่ | เซนเซอร์ จำกัด | เซนเซอร์ต้นกำเนิด (ORG1) | |
| 420 | 5 µm | 10 มม./วินาที | ภายใน 20 µm | ภายใน ±5.0 µm | 10µm | 30 µm | 10µm | 20µm | มี | มี |
| 630 | ||||||||||
| 650 | ||||||||||
| 820 | ||||||||||
ชุดขับมอเตอร์: รุ่นชุดขับมอเตอร์ที่ใช้ในซีรีส์นี้คือ E-DR42B.ยี่ห้อและรุ่นของต่อเชื่อมแบบบัสไดรเวอร์: leadshine DM3C-EC522.สายกลมขนาดเล็ก: รุ่นสายกลมขนาดเล็กที่ใช้ในซีรีส์นี้คือ HRS12-2M (สายกลมขนาดเล็กยาว 2 เมตร) / HRS12-4M (สายกลมขนาดเล็กยาว 4 เมตร)ประเภทเหล็กฉากสำหรับยึดเซอร์โวมอเตอร์ แนะนำยี่ห้อมอเตอร์: Yaskawa, inovance, Mitsubishi, leadshine, moons เป็นต้น อุปกรณ์แหล่งจ่ายที่แนะนำ: 50W, 100W โปรดตรวจสอบมิติการติดตั้งของมอเตอร์อย่างรอบคอบ■ สเปคทั่วไป
| ฟีดสกรู | บอลสกรู ⌀6, สายนำไฟฟ้า 1 มม. | |
| มอเตอร์ | ชนิด | สเต็ปปิ้งมอเตอร์ 2 เฟส |
| มุมสเต็ป | 1.8° | |
| ชุดขับมอเตอร์ | แรงดันไฟเลี้ยง | DC12 ถึง 50 V |
| กระแส Output | 0.1 ถึง 2.2 A | |
| แรงดันสัญญาณพัลส์ | 5 ถึง 24 V | |
| โหมดอินพุตพัลส์ | พัลส์คู่ / พัลส์ + ทิศทาง | |
| การตั้งค่าไมโครสเต็ป | 200 ถึง 51200 | |
| คอนเนคเตอร์ | ชนิด | HR10A-10J-12P (Hirose) |
| ชนิดด้านรับ | HR10A-10P-12S (Hirose) | |
| กระดานเซนเซอร์ | แรงดันไฟเลี้ยง | 24 V DC ±10% |
| ชนิดเซนเซอร์ | เซนเซอร์ตรวจจับวัตถุ (โฟโตอิเล็กทริคเซนเซอร์) มิเนียเจอร์ EE-SX4320 (omron) | |
| เอาต์พุตควบคุม | เอาท์พุตขาคอลเลคเตอร์แบบเปิดวงจร NPN | |
| ลอจิกของเอาต์พุต | เมื่อมีการตรวจจับ (แสงถูกบัง): เอาต์พุตทรานซิสเตอร์ปิด (ไม่นำไฟฟ้า) | |
■ การจัดเรียงขาพินคอนเนคเตอร์

■ แผนภาพการเชื่อมต่อสายไฟ


■ แผนภาพการเชื่อมต่อสายไฟ

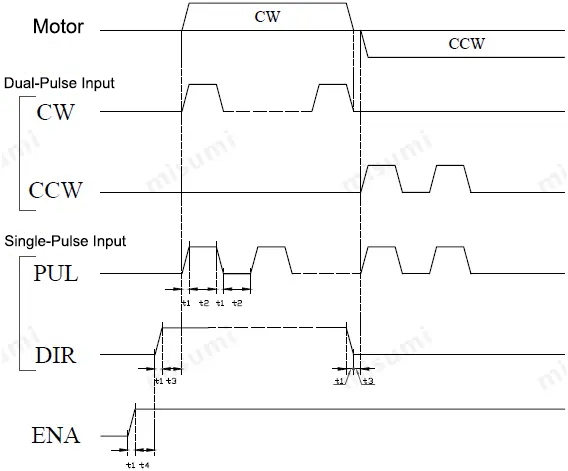
t1 < 0.1 µs t2 ≥ 0.9 µs t3 ≥ 10 µs
t4: ENA (สัญญาณเปิดใช้งาน) t4 ควรตั้งค่าให้เป็นระดับสูงอย่างน้อย 10 µs ก่อน DIR โดยทั่วไป แนะนำให้ปล่อยขา ENA+ และ ENA- ไม่ต้องเชื่อมต่อ
คุณสมบัติผลิตภัณฑ์
คุณสมบัติที่ 1: โดยการทำให้โครงสร้างเรียบง่ายขึ้นและปรับปรุงกระบวนการผลิต ทำให้สามารถลดราคาได้
คุณสมบัติที่ 2: โดยการจัดเรียงลูกบอลเหล็กภายในใหม่และขยายฐานรอง/แผ่นรอง ทำให้สามารถเลือกช่วงระยะการเคลื่อนที่ได้ตั้งแต่ 18 มม. ถึง 43 มม.
คุณสมบัติที่ 3: โดยการเพิ่มรูสำหรับสลักกำหนดตำแหน่งที่ฐานรอง/แผ่นรองด้านบนและด้านล่างของโต๊ะสไลด์ ทำให้สามารถประกอบและถอดแยกได้อย่างรวดเร็ว
คุณสมบัติที่ 4: ขนาดเส้นผ่านศูนย์กลางและตำแหน่งของรูสำหรับการวางตำแหน่งในซีรีส์ 40/60/80 ได้รับการมาตรฐาน ทำให้สามารถนำโต๊ะสไลด์ขนาดต่าง ๆ มาประกอบเข้าด้วยกันได้อย่างหลากหลาย
คุณสมบัติที่ 5: ได้เพิ่มแรงดันไฟฟ้าสำหรับเซนเซอร์ลิมิต/ไดรเวอร์เป็น 32 V เพื่อลดปัญหาการขัดข้อง เช่น การไหม้เสียหายที่เกิดจากแรงดันไฟฟ้าไม่เสถียร
■ ระยะการเคลื่อนที่คุณสมบัติที่ 2: โดยการจัดเรียงลูกบอลเหล็กภายในใหม่และขยายฐานรอง/แผ่นรอง ทำให้สามารถเลือกช่วงระยะการเคลื่อนที่ได้ตั้งแต่ 18 มม. ถึง 43 มม.
คุณสมบัติที่ 3: โดยการเพิ่มรูสำหรับสลักกำหนดตำแหน่งที่ฐานรอง/แผ่นรองด้านบนและด้านล่างของโต๊ะสไลด์ ทำให้สามารถประกอบและถอดแยกได้อย่างรวดเร็ว
คุณสมบัติที่ 4: ขนาดเส้นผ่านศูนย์กลางและตำแหน่งของรูสำหรับการวางตำแหน่งในซีรีส์ 40/60/80 ได้รับการมาตรฐาน ทำให้สามารถนำโต๊ะสไลด์ขนาดต่าง ๆ มาประกอบเข้าด้วยกันได้อย่างหลากหลาย
คุณสมบัติที่ 5: ได้เพิ่มแรงดันไฟฟ้าสำหรับเซนเซอร์ลิมิต/ไดรเวอร์เป็น 32 V เพื่อลดปัญหาการขัดข้อง เช่น การไหม้เสียหายที่เกิดจากแรงดันไฟฟ้าไม่เสถียร
แสดงระยะทางที่พื้นผิวโต๊ะสไลด์สามารถเคลื่อนที่ได้ (ในแต่ละหน้าสินค้า ภาพประกอบจะแสดงที่ตำแหน่งกึ่งกลางของช่วงระยะการเคลื่อนที่)
■ พิกัดน้ำหนัก
น้ำหนักสูงสุดที่สามารถวางบนจุดกึ่งกลางของผิวโต๊ะสไลด์ได้ และค่าน้ำหนักที่สามารถขับเคลื่อนด้วยความเร็วสูงสุด
■ ความแม่นยำในการวางตำแหน่งทิศทางเดียว
การวางตำแหน่งจะดำเนินการตามลำดับที่ช่วงระยะคงที่ในทิศทางเดียวจากจุดอ้างอิง (จุดสิ้นสุดของระยะชัก) ตลอดช่วงระยะการเคลื่อนที่ จะมีการวัดและคำนวณค่าความแตกต่างระหว่างค่าที่วัดได้จริงในแต่ละจุดการวางตำแหน่ง (จากจุดอ้างอิงถึงตำแหน่งที่เคลื่อนที่จริง) กับค่าทางทฤษฎี (ตำแหน่งที่คำสั่งควรจะเคลื่อนที่ไป) ค่าความแตกต่างสูงสุดนี้จะถูกกำหนดให้เป็นความแม่นยำในการวางตำแหน่งแบบทิศทางเดียว

■ ความสามารถในการทำซ้ำ
ที่จุดใดจุดหนึ่ง ให้ทำการวางตำแหน่งจากทิศทางเดียวกัน 7 ครั้ง วัดค่าความคลาดเคลื่อนของตำแหน่งหยุด และคำนวณค่าครึ่งหนึ่งของความคลาดเคลื่อนสูงสุด ทำซ้ำการดำเนินการนี้ที่สามจุด ได้แก่ ตรงกลางและปลายทั้งสองด้านของระยะชัก ค่าที่คำนวณได้มากที่สุดจะถูกกำหนดให้เป็นความสามารถในการทวนซ้ำ

วิธีการใช้งาน
โต๊ะสไลด์ซีรีส์ C-XYMBS มาพร้อมกับสเต็ปปิ้งมอเตอร์สองเฟส, ชุดขับสเต็ปเปอร์มอเตอร์สองเฟสของ MISUMI และสายไฟ ลูกค้าเพียงแค่เตรียมแหล่งจ่ายไฟ 24 V และตัวควบคุมหลัก (PLC หรืออุปกรณ์ควบคุมการเคลื่อนที่) เพื่อใช้งานได้ ตัวอย่างของการเชื่อมต่อสายไฟระหว่างแต่ละผลิตภัณฑ์จะแสดงไว้ในรูปด้านล่าง

*1 สายเคเบิลภายในกรอบเส้นประเป็นสายเคเบิลขนาด 2 เมตร หรือ 4 เมตร

*1 สายเคเบิลภายในกรอบเส้นประเป็นสายเคเบิลขนาด 2 เมตร หรือ 4 เมตร
ข้อควรระวัง
■ สภาพแวดล้อมการใช้งานของสเตจ
■ งานซ่อมบำรุงของสไลด์เทเบิล
ไม่มีมาตรฐานงานซ่อมบำรุงประจำที่เป็นแบบเดียวกัน เนื่องจากความแตกต่างของชนิดจาระบีและสภาพแวดล้อมการใช้งาน ขึ้นอยู่กับสภาพการขับเคลื่อนและประเภทของราง กรุณาตรวจสอบจาระบีอย่างน้อยเดือนละหนึ่งครั้ง
■ เกี่ยวกับการเดินสายไฟ
สายมอเตอร์และสายต่อเซนเซอร์ของผลิตภัณฑ์นี้ใช้การเชื่อมต่อแบบสายต่อคอนเนคเตอร์ หากสายบนด้านโต๊ะสไลด์ถูกงอบ่อยครั้ง อาจทำให้เข็มขัดรัดสายไฟขาด ซึ่งอาจทำให้หัวต่อมอเตอร์และหัวต่อเซนเซอร์หลวม ส่งผลให้เกิดการสัมผัสไม่ดีหรือขดลวดขาดได้ แนะนำให้ยึดคอนเนคเตอร์ที่ฝั่งไกด์เทเบิ้ลเมื่อเดินสายเคเบิล

 รูปภาพใช้เพื่อการอ้างอิงเท่านั้น
รูปภาพใช้เพื่อการอ้างอิงเท่านั้น
■ งานซ่อมบำรุงของสไลด์เทเบิล
ไม่มีมาตรฐานงานซ่อมบำรุงประจำที่เป็นแบบเดียวกัน เนื่องจากความแตกต่างของชนิดจาระบีและสภาพแวดล้อมการใช้งาน ขึ้นอยู่กับสภาพการขับเคลื่อนและประเภทของราง กรุณาตรวจสอบจาระบีอย่างน้อยเดือนละหนึ่งครั้ง
■ เกี่ยวกับการเดินสายไฟ
สายมอเตอร์และสายต่อเซนเซอร์ของผลิตภัณฑ์นี้ใช้การเชื่อมต่อแบบสายต่อคอนเนคเตอร์ หากสายบนด้านโต๊ะสไลด์ถูกงอบ่อยครั้ง อาจทำให้เข็มขัดรัดสายไฟขาด ซึ่งอาจทำให้หัวต่อมอเตอร์และหัวต่อเซนเซอร์หลวม ส่งผลให้เกิดการสัมผัสไม่ดีหรือขดลวดขาดได้ แนะนำให้ยึดคอนเนคเตอร์ที่ฝั่งไกด์เทเบิ้ลเมื่อเดินสายเคเบิล
 รูปภาพใช้เพื่อการอ้างอิงเท่านั้น
รูปภาพใช้เพื่อการอ้างอิงเท่านั้นการใช้งานอุตสาหกรรม
| อิเล็กทรอนิกส์/เครื่องใช้ไฟฟ้า | อุตสาหกรรมยานยนต์ | ทางการแพทย์ | ||
 |  |  | ||
| สมาร์ทโฟน | สารกึ่งตัวนำ | แบตเตอรี่ลิเธียม | ||
 |  |  |
สินค้าที่เกี่ยวข้อง
| ชุดขับมอเตอร์สเต็ปเปอร์ | แท่นอัตโนมัติแกน X งานละเอียดสูง | แท่นอัตโนมัติแกน X งานละเอียดปานกลาง | ||
 |  |  | ||
| รหัสรุ่นสินค้าตัวแทน: C-DR42A | รหัสรุ่นสินค้าตัวแทน: XMSG413-LA24-C-N | รหัสรุ่นสินค้าตัวแทน: XMBS415-L-N |
เอกสารที่เกี่ยวข้อง
■ ชุดขับมอเตอร์
ชุดขับมอเตอร์ที่รองรับสามารถใช้งานได้ทั้งโหมดพัลส์คู่และโหมดพัลส์ + ควบคุมทิศทาง สำหรับมิติการติดตั้งและคู่มือการใช้งาน กรุณาดูได้ที่: E-DR42B.
■ชุดขับมอเตอร์แบบต่อเชื่อมแบบบัส
สำหรับขนาดติดตั้งและคู่มือการใช้งานของชุดขับมอเตอร์ กรุณาอ้างอิงจาก leadshine DM3C-EC522
■ ดรออิ้ง/ภาพร่างแบบสลักกำหนดตำแหน่ง

ชุดขับมอเตอร์ที่รองรับสามารถใช้งานได้ทั้งโหมดพัลส์คู่และโหมดพัลส์ + ควบคุมทิศทาง สำหรับมิติการติดตั้งและคู่มือการใช้งาน กรุณาดูได้ที่: E-DR42B.
■ชุดขับมอเตอร์แบบต่อเชื่อมแบบบัส
สำหรับขนาดติดตั้งและคู่มือการใช้งานของชุดขับมอเตอร์ กรุณาอ้างอิงจาก leadshine DM3C-EC522
■ ดรออิ้ง/ภาพร่างแบบสลักกำหนดตำแหน่ง

*ตั้งแต่วันที่ 1 มิถุนายน 2023 เป็นต้นไป ไดรเวอร์ที่ติดตั้งมาจะรองรับอินพุตพัลส์สองประเภท ได้แก่ พัลส์คู่ และพัลส์ + ทิศทาง
รายการซีรีส์โต๊ะสไลด์จักรกลอัตโนมัติแบบประหยัด
หากคุณต้องการชุดแบบหลายแกนอื่น ๆ กรุณาติดต่อ ts@misumi.com.vn
| ทิศทางการเคลื่อนที่ | ||||||
| แกน X | แกนหมุน | โกนิโอมิเตอร์ | แกน Z | การรวมแบบหลายแกน | ||
| ไกด์ กลไก |  ลูกบอลเชิงเส้น | รุ่นบาง, ความสามารถในการทวนซ้ำ ±1.5µ รุ่นมาตรฐาน, ความสามารถในการทวนซ้ำ ±1µ รุ่นมาตรฐาน, ความสามารถในการทวนซ้ำ ±1.5µ พร้อมรีไซเคลูเลเตอร์, รุ่นมาตรฐาน, ความสามารถในการทวนซ้ำ ±1.5µ/±2µ พร้อมรีไซเคลูเลเตอร์, รุ่นมาตรฐาน, ความสามารถในการทวนซ้ำ ±1µ พร้อมฝาครอบรีไซเคลูเลเตอร์, รุ่นมาตรฐาน, ความสามารถในการทวนซ้ำ ±1µ ความสามารถในการทวนซ้ำ ±5µ | — | — | ความสามารถในการทวนซ้ำของแบบยก ±5µ ความสามารถในการทวนซ้ำ ±5µ | ความสามารถในการทวนซ้ำ ±5µ |
 ตลับลูกกลิ้งแบบสลับ | ความสามารถในการทวนซ้ำ ±1.5µ ความสามารถในการทวนซ้ำ ±1µ | — | ความสามารถในการทวนซ้ำ ±0.006° ความสามารถในการทวนซ้ำ ±0.01° | ความสามารถในการทวนซ้ำ ±1µ | ความสามารถในการทวนซ้ำ ±0.01° | |
| กลไก เลื่อน |  บอลสกรู | — | ความแม่นยำในการวางตำแหน่งซ้ำ ±0.005° ความแม่นยำในการวางตำแหน่งซ้ำ ±0.01° | — | — | — |
 เฟืองตัวหนอนและตัวหนอน | — | ความสามารถในการทวนซ้ำ ±0.05° ความสามารถในการทวนซ้ำ ±0.08° | — | — | — | |