สเตจกำหนดตำแหน่งแบบมอเตอร์แกน X ชนิดไกด์ลูกบอลเชิงเส้น ความสามารถในการทวนซ้ำของการวางตำแหน่ง ±1μ
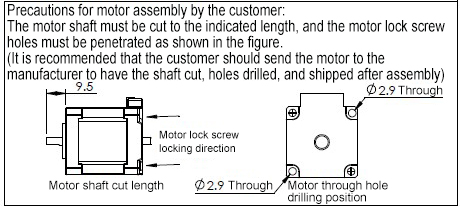
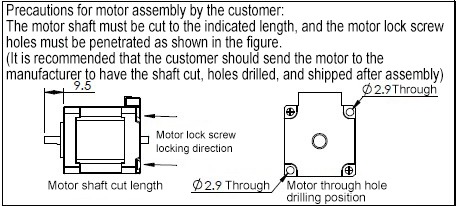
ข้อควรระวัง
รายละเอียดสินค้า
_001.jpg)
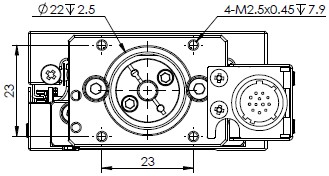
 ภาพด้านบนแสดงสถานการณ์เมื่อเลือกแผ่นปิดฝาแบบ L กรุณาตรวจสอบขนาดโดยละเอียดเมื่อเลือกแผ่นปิดฝาแบบ R โดยใช้ข้อมูล CAD
ภาพด้านบนแสดงสถานการณ์เมื่อเลือกแผ่นปิดฝาแบบ L กรุณาตรวจสอบขนาดโดยละเอียดเมื่อเลือกแผ่นปิดฝาแบบ R โดยใช้ข้อมูล CAD เหล็กฉากสำหรับยึดสเต็ปปิ้งมอเตอร์
E-XMBSH6020-R-S3, E-XMBSH6030-R-S3
E-XMBSH4015-R-S3, E-XMBSH6015-R-S3
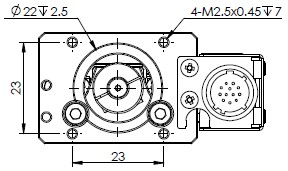
 ภาพด้านบนแสดงสถานการณ์เมื่อเลือกใช้แผ่นครอบปิด R โปรดยืนยันขนาดโดยละเอียดเมื่อเลือกใช้แผ่นครอบปิด L โดยใช้ข้อมูล CAD
ภาพด้านบนแสดงสถานการณ์เมื่อเลือกใช้แผ่นครอบปิด R โปรดยืนยันขนาดโดยละเอียดเมื่อเลือกใช้แผ่นครอบปิด L โดยใช้ข้อมูล CAD วัสดุ: เหล็กกล้า
วัสดุ: เหล็กกล้า กระบวนการเตรียมผิว: ชุบนิกเกิ้ลแบบไม่ใช้ไฟฟ้า
กระบวนการเตรียมผิว: ชุบนิกเกิ้ลแบบไม่ใช้ไฟฟ้า| รหัสรุ่น/ Part number | ไกด์เทเบิ้ล ความยาว (มม.) |  ตำแหน่ง แผ่นครอบปิด |  มอเตอร์ มอเตอร์ |  ชุดขับมอเตอร์ ชุดขับมอเตอร์ |  สายไฟ สายไฟความยาว (ม.) | สเปค เชิงกล | สเปค ความแม่นยำ | เซนเซอร์ | ||||||||||||
 ชนิด ชนิด |  รูปทรง รูปทรง | ระยะทางในการเคลื่อนที่ (มม.) | พิกัดน้ำหนัก (N) | น้ำหนัก (กก.) | ความละเอียด (พัลส์) | ความเร็ว สูงสุด | ความแม่นยำ ในการวางตำแหน่ง เฉพาะทิศทาง | ทำซ้ำ การวางตำแหน่ง ความแม่นยำ | การทำงาน ไม่ถูกต้อง | ความ ขนาน | ความตรง | การเคลื่อนไหว ความขนาน | ขีดจำกัด เซนเซอร์ | เซ็นเซอร์ต้นกำเนิด (ORG1) | ||||||
| E-XMBSH | แกน X | 4015 | 40 × 40 | L | ไม่มีมาร์คกิ้ง (พร้อมสเต็ปปิ้งมอเตอร์มาตรฐาน) S1 (พร้อมขายึดเซอร์โว PCD=45) S2 (พร้อมเหล็กฉากสำหรับยึดเซอร์โว PCD=46) S3 (พร้อมเหล็กฉากสำหรับยึดสเต็ปปิ้งมอเตอร์เฟรม 28) | A (ชุดขับมอเตอร์แบบพัลส์ แกนเดียว) N (ไม่มีชุดขับมอเตอร์) | 2 (สายไฟ 2 ม.) 4 (สายไฟ 4 ม.) | 15 | 98 | 0.38 | 5µm | 10 มม./วินาที | 15µm | ±1µm | 2.5µm | 30µm | 3µm | 15µm | มีให้ | มีให้ |
| R | ||||||||||||||||||||
| 6015 | 60 × 60 | L | 15 | 0.6 | ||||||||||||||||
| R | ||||||||||||||||||||
| 6020 | 60 × 60 | L | 20 | 0.71 | 20 มม./วินาที | 2µm | ||||||||||||||
| R | ||||||||||||||||||||
| 6030 | 60 × 70 | L | 30 | 0.81 | ||||||||||||||||
| R | ||||||||||||||||||||
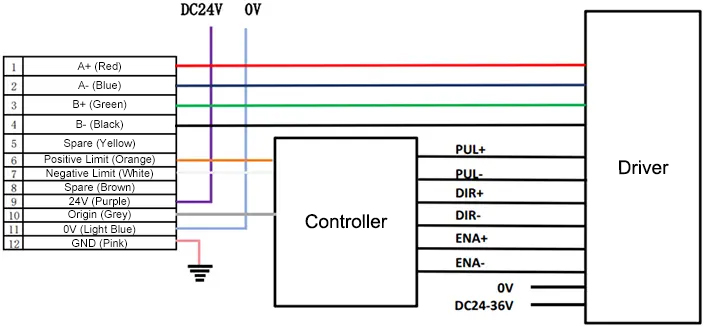
ชุดขับมอเตอร์: รุ่นชุดขับมอเตอร์ที่ใช้ในซีรีส์นี้: E-DR42C.สายเคเบิล: รุ่นสายเคเบิลที่ใช้ในซีรีส์นี้ ได้แก่ HRS12-2M (สายเคเบิลยาว 2 เมตร) / HRS12-4M (สายเคเบิลยาว 4 เมตร).การผสมผสานแบบหลายแกน: หากต้องการสอบถามเกี่ยวกับการผสมผสานแบบหลายแกนในซีรีส์นี้ กรุณาติดต่อ: ts@misumi.com.vn.■ รายละเอียดจำเพาะทั่วไป
| E-XMBSH4015 | E-XMBSH6015 | E-XMBSH6020 | E-XMBSH6030 | ||
| ฟีดสกรู | บอลสกรู ⌀6, สายนำไฟฟ้า 1 มม. | บอลสกรู ⌀8, สายตะกั่ว 1 มม. | |||
| รางไกด์ | ชนิดบอลไกด์เชิงเส้น | ||||
| มอเตอร์ | รูปทรง | สเต็ปปิ้งมอเตอร์มาตรฐาน 2 เฟส 1.3 A/เฟส | |||
| มุมเสต็ป | 1.8° | ||||
| ชุดขับมอเตอร์แบบพัลส์ | แรงดันไฟเลี้ยง | 24 ถึง 36 V DC | |||
| กระแส Output | 0.3 A ถึง 2.2 A/เฟส (สูงสุด) | ||||
| แรงดันสัญญาณพัลส์ | 5VDC | ||||
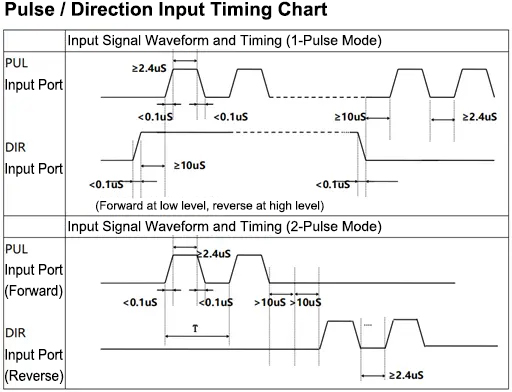
| วิธีการป้อนพัลส์อินพุต | พัลส์ + ทิศทาง หรือ พัลส์คู่ | ||||
| จำนวนการแบ่งย่อย | 200 ถึง 25600 | ||||
| คอนเนคเตอร์ | รหัสรุ่น/ Part number | HR10A-10R-12P (Hirose) | |||
| รหัสรุ่นด้านรับ | HR10A-10P-12S (Hirose) | ||||
| ซับสเตรตเซนเซอร์ | แรงดันไฟเลี้ยง | 24 V DC ± 10% | |||
| ชนิดเซนเซอร์ | โฟโต้เซนเซอร์มิเนียเจอร์ RPI-0125 (ROHM) | ||||
| เอาต์พุต อุปกรณ์ควบคุม | เอาท์พุตขาคอลเลคเตอร์แบบเปิดวงจร NPN | ||||
| ลอจิกของเอาท์พุต | ระหว่างการตรวจจับ (มีเงาบัง): Output ทรานซิสเตอร์ปิด (ไม่นำไฟฟ้า) | ||||
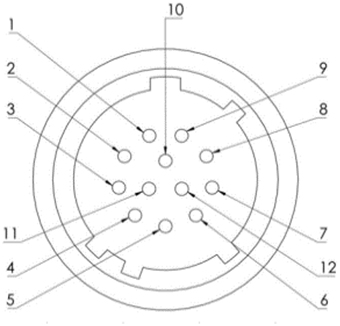
■ การจัดเรียงขาพินคอนเนคเตอร์
■ไทม์มิ่งไดอะแกรม
ชุดขับมอเตอร์แบบพัลส์
คุณสมบัติที่ 2: ด้วยการทำให้โครงสร้างเรียบง่ายขึ้นและปรับปรุงกระบวนการผลิต จึงสามารถลดราคาได้
คุณสมบัติที่ 3: โดยการเพิ่มรูสำหรับสลักกำหนดตำแหน่งที่ฐานรอง/แผ่นรองด้านบนและด้านล่างของโต๊ะสไลด์ ทำให้สามารถประกอบและถอดแยกได้อย่างรวดเร็ว
คุณสมบัติที่ 4: ขนาดเส้นผ่านศูนย์กลางและตำแหน่งของรูสลักกำหนดตำแหน่งถูกกำหนดให้เป็นมาตรฐาน ทำให้สามารถนำแท็บสไลด์ขนาดต่าง ๆ มาประกอบเข้าด้วยกันแบบเครื่องมือชนิดถอดสับเปลี่ยนได้ เพื่อรองรับตัวเลือกการประกอบที่หลากหลาย
■ สภาพแวดล้อมการใช้งานของแท็บสไลด์
สภาพแวดล้อมการใช้งาน: 10 ถึง 50°C, 20 ถึง 70%RH (ไม่มีการควบแน่น)
สภาพแวดล้อมที่แนะนำ: 22±5°C, 20 ถึง 70%RH (ไม่มีการควบแน่น)
กรุณาหลีกเลี่ยงการใช้งานแท็บสไลด์ในสภาพแวดล้อมดังต่อไปนี้
(1) สภาพแวดล้อมที่มีฝุ่น (โดยเฉพาะผงโลหะ)
(2) สภาพแวดล้อมที่มีแสงแดดโดยตรงหรือมีการแผ่รังสีความร้อน
(3) ใกล้แหล่งกำเนิดไฟ
(4) สภาพแวดล้อมที่มีแก๊สที่กัดกร่อนหรือไวไฟ
(5) สภาพแวดล้อมที่มีน้ำหรือน้ำมันกระเด็น
(6) สภาพแวดล้อมที่มีแรงสั่นสะเทือนหรือแรงกระแทกสูง
(7) สภาพแวดล้อมที่มีตัวทำละลายอินทรีย์หรือมีปริมาณเกลือสูง
■เกี่ยวกับงานซ่อมบำรุงแท็บสไลด์
ยังไม่มีมาตรฐานงานซ่อมบำรุงประจำที่เป็นแบบเดียวกัน เนื่องจากชนิดของจาระบีและตัวอย่างการใช้งานที่แตกต่างกัน ขึ้นอยู่กับสภาพการขับเคลื่อนและประเภทของราง กรุณาตรวจสอบจาระบีอย่างน้อยเดือนละหนึ่งครั้ง




ชุดขับมอเตอร์ที่รองรับสามารถควบคุมได้ทั้งแบบพัลส์คู่และพัลส์ + ทิศทาง สำหรับขนาดติดตั้งและคู่มือผู้ใช้ กรุณาดูที่: E-DR42C



