ไดรเวอร์เซอร์โว AC ฟังก์ชั่นครบชุด E-DHAS Series

แบรนด์ :
MISUMI
ข้อควรระวัง
- เนื่องจากชุดแบตเตอรี่ E-AAS-BATBOX ยังไม่ได้วางจำหน่าย จึงไม่สามารถใช้งานร่วมกับแบบสัมบูรณ์ได้ กรุณาติดต่อเราเพื่อขอข้อมูลเกี่ยวกับวันวางจำหน่ายของชุดคิทนี้
รายละเอียดสินค้า
เซอร์โวมอเตอร์กระแสสลับของ MISUMI ที่สามารถใช้งานร่วมกับมอเตอร์ E-MASS2, E-MASH2 และ E-MASH1 ได้
วัสดุที่เกี่ยวข้อง
ซอฟท์แวร์ไดร์เวอร์ EDrive สำหรับชุดขับมอเตอร์ของ MISUMI คลิกที่นี่เพื่อดาวน์โหลดทันที
คู่มือเริ่มต้นใช้งานชุดขับมอเตอร์ของ MISUMI คลิกเพื่อดาวน์โหลด:
>> E-DHASxxE-F (ชนิด EtherCAT)
>> E-DHASxxP-F (ชนิด Pulse + RS485)
คู่มือผลิตภัณฑ์ชุดขับมอเตอร์ MISUMI คลิกเพื่อดาวน์โหลด:
>> E-DHAS_E-F (ชนิด EtherCAT)
>> E-DHAS_P-F (ชนิด Pulse + RS485)
>>สายส่งกำลัง / สายต่อเอ็นโค้ดเดอร์ / สายดีบัก / ชุดแบตเตอรี่
สาย I/O สำหรับชุดขับของ MISUMI
>>สาย IO
สายฟังก์ชัน STO
คู่มือเริ่มต้นใช้งานชุดขับมอเตอร์ของ MISUMI คลิกเพื่อดาวน์โหลด:
>> E-DHASxxE-F (ชนิด EtherCAT)
>> E-DHASxxP-F (ชนิด Pulse + RS485)
คู่มือผลิตภัณฑ์ชุดขับมอเตอร์ MISUMI คลิกเพื่อดาวน์โหลด:
>> E-DHAS_E-F (ชนิด EtherCAT)
>> E-DHAS_P-F (ชนิด Pulse + RS485)
สินค้าที่เกี่ยวข้อง
สายสำหรับเซอร์โวมอเตอร์และชุดขับของ MISUMI>>สายส่งกำลัง / สายต่อเอ็นโค้ดเดอร์ / สายดีบัก / ชุดแบตเตอรี่
สาย I/O สำหรับชุดขับของ MISUMI
>>สาย IO
สายฟังก์ชัน STO
คำอธิบลักษณ์สัญลักษณ์ชุดขับมอเตอร์เซอร์โว

1. สำหรับการใช้งานเอ็นโค้ดเดอร์แบบเพิ่มค่า
| รหัสรุ่น/ Part number | ①รุ่น | ②พิกัดกำลังไฟฟ้า (W) | ③ประเภทการควบคุม | ④สเปกชุดขับมอเตอร์ | สังเกต |
| E-DHAS01P-F | E-DHAS | 01: 100W | P: พัลส์+ต่อเชื่อมแบบบัส RS485 | F: ฟังก์ชั่นครบถ้วน | ไม่จำเป็นต้องใช้แบตเตอรี่ |
| E-DHAS04P-F | 04: 400W | ||||
| E-DHAS08P-F | 08: 750W | ||||
| E-DHAS10P-F | 10: 1000W | ||||
| E-DHAS01E-F | 01: 100W | E: ต่อเชื่อมแบบบัส EtherCAT | |||
| E-DHAS04E-F | 04: 400W | ||||
| E-DHAS08E-F | 08: 750W | ||||
| E-DHAS10E-F | 10: 1000W |
2. สำหรับการใช้งานเอ็นโค้ดเดอร์แบบสัมบูรณ์ (จำเป็นต้องซื้อชุดแบตเตอรี่ E-AAS-BATBOX เพิ่มเติม)
| รหัสรุ่น/ Part number | ①รุ่น | ②พิกัดกำลังไฟฟ้า (W) | ③ประเภทการควบคุม | ④สเปกชุดขับมอเตอร์ | สังเกต |
| E-DHAS01P-F | E-DHAS | 01: 100W | P: พัลส์+ต่อเชื่อมแบบบัส RS485 | F: ฟังก์ชั่นครบถ้วน | จำเป็นต้องใช้ชุดแบตเตอรี่ E-AAS-BATBOX |
| E-DHAS04P-F | 04: 400W | ||||
| E-DHAS08P-F | 08: 750W | ||||
| E-DHAS10P-F | 10: 1000W | ||||
| E-DHAS01E-F | 01: 100W | E: ต่อเชื่อมแบบบัส EtherCAT | |||
| E-DHAS04E-F | 04: 400W | ||||
| E-DHAS08E-F | 08: 750W | ||||
| E-DHAS10E-F | 10: 1000W |
ความแตกต่างของชนิดวงจรขับ
| รหัสรุ่น/ Part number | E-DHAS□□P-F | E-DHAS□□E-F |
| รูปทรง | พัลส์ | EtherCAT |
| แรงดันขาเข้า | 1 เฟส / 3 เฟส 200 V ถึง 240 V, ±10%, 50/60 Hz | |
| กระแสเอาต์พุตสูงสุด | กระแสไฟฟ้าสูงสุด 21 A; พิกัดกระแสไฟฟ้า 7 A | |
| พัลส์อินพุต | รองรับ | ไม่รองรับ |
| EtherCAT | ไม่รองรับ | รองรับ |
| ปรับจูนอัตโนมัติ | รองรับ | |
| การซิงโครไนซ์แกนตรี | รองรับ | |
| การเปรียบเทียบตำแหน่ง | รองรับ | |
| STO | รองรับ | |
Drawing บอกขนาด
(หน่วย: มม.)
100W & 400W 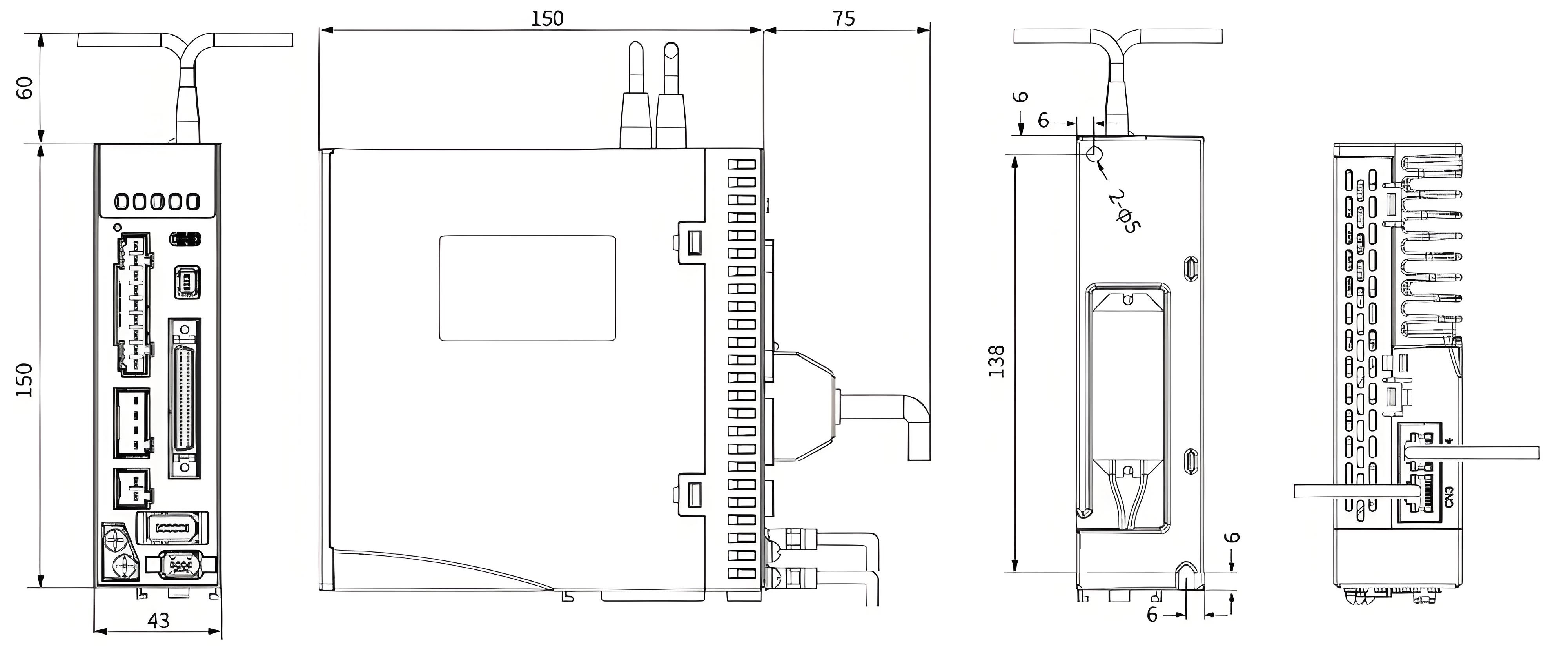
750W & 1000W100W & 400W

E-DHAS01P(E), E-DHAS04P(E)

E-DHAS08P(E), E-DHAS10P(E)
ตารางข้อมูลจำเพาะ
| รุ่นชุดขับมอเตอร์ | E-DHAS01P-F | E-DHAS04P-F | E-DHAS08P-F | E-DHAS10P-F | E-DHAS01E-F | E-DHAS04E-F | E-DHAS08E-F | E-DHAS10E-F |
| พิกัดกำลังไฟฟ้า (W) | 100 | 400 | 750 | 1000 | 100 | 400 | 750 | 1000 |
| พิกัดกระแสไฟฟ้าขาออก (Arms) | 1.2 | 2.8 | 5.5 | 7.0 | 1.2 | 2.8 | 5.5 | 7.0 |
| กระแสเอาต์พุตสูงสุด (Arms) | 4.8 | 9.3 | 16.9 | 21.0 | 4.8 | 9.3 | 16.9 | 21.0 |
| ค่าความต้านทานเบรกแบบปฏิรูป (Ω) | 100 | 100 | 100 | 100 | — | 100 | 100 | 100 |
| กำลังไฟฟ้าเบรกแบบปฏิรูปของตัวต้านทาน (W) | 50 | 50 | 50 | 50 | — | 50 | 50 | 50 |
| ฟังก์ชั่น ตัวต้านทานเบรกแบบปฏิรูป | ทุกรุ่นมาพร้อมกับตัวต้านทานเบรกแบบปฏิรูปในตัว และยังรองรับการเชื่อมต่อกับตัวต้านทานเบรกภายนอกได้อีกด้วย | |||||||
| วิธีการระบายความร้อน | ระบายความร้อนตามธรรมชาติ | ระบายความร้อนด้วยพัดลมระบายความร้อน | ระบายความร้อนตามธรรมชาติ | ระบายความร้อนด้วยพัดลมระบายความร้อน | ||||
ข้อมูลอุปกรณ์เสริม
| รหัสรุ่น/ Part number มอเตอร์ | มาตรฐานที่สอดคล้อง กับชุดขับมอเตอร์แบบ Pulse (ประเภทชุดขับมอเตอร์) | มาตรฐานที่สอดคล้อง กับชุดขับมอเตอร์ต่อเชื่อมแบบบัส EtherCAT (ประเภทชุดขับมอเตอร์) | หน้าแปลนมอเตอร์ มิติ (มม) | อุปกรณ์แหล่งจ่าย (W) | เบรกแม่เหล็กไฟฟ้า | อุปกรณ์แหล่งจ่าย แรงดันไฟฟ้า |
| E-MAS□2-0401 E-MAS□2-04A5 | E-DHAS01P-F(ฟังก์ชั่นเต็มรูปแบบ) E-DFAS01P(ฟังก์ชั่นมาตรฐาน) | E-DHAS01E-F(ฟังก์ชั่นเต็มรูปแบบ) E-DFAS01E(ฟังก์ชั่นมาตรฐาน) | 40 | 100 | ไม่มีให้ | AC220V |
| E-MAS□2-0401B E-MAS□2-04A5B | มีให้ | |||||
| E-MAS□2-0602 | E-DHAS04P-F(ฟังก์ชั่นเต็มรูปแบบ) E-DFAS04P(ฟังก์ชั่นมาตรฐาน) | E-DHAS04E-F(ฟังก์ชั่นครบถ้วน) E-DFAS04E(ฟังก์ชั่นมาตรฐาน) | 60 | 200 | ไม่มีให้ | |
| E-MAS□2-0602B | มีให้ | |||||
| E-MAS□2-0604 | 400 | ไม่มีให้ | ||||
| E-MAS□2-0604B | มีให้ | |||||
| E-MAS□2-0808 | E-DHAS08P-F(ฟังก์ชั่นครบถ้วน) E-DFAS08P(ฟังก์ชั่นมาตรฐาน) | E-DHAS08E-F(ฟังก์ชั่นครบถ้วน) E-DFAS08E(ฟังก์ชั่นมาตรฐาน) | 80 | 750 | ไม่มีให้ | |
| E-MAS□2-0808B | มีให้ | |||||
| E-MAS□2-0810 | E-DHAS10P-F(ฟังก์ชั่นครบถ้วน) E-DFAS10P(ฟังก์ชั่นมาตรฐาน) | E-DHAS10E-F(ฟังก์ชั่นครบถ้วน) E-DFAS10E(ฟังก์ชั่นมาตรฐาน) | 1000 | ไม่มีให้ | ||
| E-MAS□2-0810B | มีให้ |
แผนภาพการเชื่อมต่อสายไฟ

สายสำหรับดีบัก

รุ่น: E-CASTC2M ความยาว: 2 ม.
ไม่จำเป็นต้องเชื่อมต่อกับแหล่งจ่ายไฟ—เพียงเชื่อมต่อไดร์เวอร์และคอมพิวเตอร์ด้วยสายสำหรับดีบัก,
จากนั้นสามารถใช้ซอฟท์แวร์ไดร์เวอร์ EDrive เพื่อตรวจสอบและปรับแต่งพารามิเตอร์ได้
สายคอนโทรล CN1
หากต้องการเลือกผลิตภัณฑ์นี้- > ไปที่ผลิตภัณฑ์สายคอนโทรล
E-DHAS□□P-F
สำหรับการใช้งานแบบพัลส์

รหัสรุ่น: E-SCSI-50PIN-1
ฟังก์ชั่นขาพินของ SCSI 50PIN Terminal
 | ขาพิน | นิยามขาพิน | ฟังก์ชั่นเริ่มต้น | คำอธิบายฟังก์ชั่น | ขาพิน | นิยามขาพิน | ฟังก์ชั่นเริ่มต้น | คำอธิบายฟังก์ชั่น |
| 1 | PUL +24 | ใส่คำสั่งพัลส์ | วิธีการใส่คำสั่งพัลส์/ทิศทางแบบความเร็วต่ำ: PUL+ และ PUL-: อินพุต 5 V แบบการเปลี่ยนแปลงการเคลื่อนที่ (500KHz) DIR+ และ DIR-: อินพุต 5 V การเปลี่ยนแปลงการเคลื่อนที่ (500KHz) PUL+24 และ PUL-: อินพุตแบบซิงเกิลเอนด์ 24 V (200KHz) DIR+24 และ DIR-: อินพุตแบบซิงเกิลเอนด์ 24 V (200KHz) | 37 | DO3+ | ALM+ | เอาต์พุตสัญญาณเตือนเซอร์โว | |
| 3 | PUL + | 36 | DO3- | ALM- | ||||
| 4 | PUL - | 39 | DO4+ | INP1+ | เอาต์พุตตำแหน่ง | |||
| 2 | DIR +24 | อินพุตคำสั่งทิศทาง | 38 | DO4- | INP1- | |||
| 5 | DIR + | 41 | DOCOM | เอาต์พุต | ขั้วรวมเอาต์พุตอเนกประสงค์ (กระแสสูงสุด: 50 mA, แรงดันสูงสุด: 30 V) | |||
| 6 | DIR - | 12 | DO5 | ZSP | เอาต์พุตสัญญาณตรวจจับความเร็วเป็นศูนย์ | |||
| 44 | PULSH+ | อินพุตคำสั่งพัลส์ความเร็วสูง | อินพุตคำสั่งพัลส์ความเร็วสูง 4 MHz, อินพุต 5 V แบบการเปลี่ยนแปลงการเคลื่อนที่ | 40 | DO6 | TLC | เอาต์พุตขีดจำกัดแรงบิดที่กำลังทำงาน | |
| 45 | PULSH- | อินพุตคำสั่งพัลส์ความเร็วสูง | 14 | อนาล็อกอินพุต 1 | AI1 | อินพุตคำสั่งความเร็วหรือขีดจำกัดความเร็วขั้วบวก (0 ถึง ±10 V) | ||
| 46 | SIGNH+ | อินพุตคำสั่งทิศทางความเร็วสูง | อินพุตคำสั่งทิศทางความเร็วสูง 4 MHz, อินพุตการเปลี่ยนแปลงการเคลื่อนที่ 5 V | 15 | GND | GND | สายดินอนาล็อก | |
| 47 | SIGNH- | อินพุตคำสั่งทิศทางความเร็วสูง | 16 | อนาล็อกอินพุต 2 | AI2 | คำสั่งแรงบิด / อินพุตจำกัดแรงบิดบวก (0 ถึง +10 V) | ||
| 13 | GND | GND | สายดินภายใน | 17 | GND | GND | สายดินอนาล็อก | |
| 7 | DI-COM | อินพุต | จุดร่วมอินพุตอเนกประสงค์ | 18 | อินพุตอนาล็อก 3 | AI3 | อินพุตคำสั่งแรงบิด / อินพุตจำกัดแรงบิดเชิงลบ (–10 ถึง 0 V) | |
| 8 | DI1 | NOT | อินพุตห้ามชุดขับมอเตอร์หมุนย้อนกลับ | 42 | AO1 | IM | เอาต์พุตมอนิเตอร์แบบแอนะล็อก 1 (สัญญาณมอนิเตอร์แบบตั้งค่าได้) | |
| 9 | DI2 | POT | อินพุตห้ามขับเดินหน้า | 43 | AO2 | SP | เอาต์พุตมอนิเตอร์แบบแอนะล็อก 2 (สัญญาณมอนิเตอร์แบบตั้งค่าได้) | |
| 26 | DI3 | ไม่มีการกำหนดค่า | ไม่มีให้ | 21 | A+ | เอาต์พุต การเปลี่ยนแปลงการเคลื่อนที่ | เอาต์พุตแบ่งความถี่ของเอ็นโค้ดเดอร์ เฟส A | |
| 27 | DI4 | GAIN | อินพุตสลับเพิ่มขึ้น | 22 | A- | เอาต์พุต การเปลี่ยนแปลงการเคลื่อนที่ | ||
| 28 | DI5 | DIV1 | อินพุตสวิตช์ตัวคูณพัลส์คำสั่ง | 48 | B+ | เอาต์พุต การเปลี่ยนแปลงการเคลื่อนที่ | เอาต์พุตแบ่งความถี่ของเอ็นโค้ดเดอร์ เฟส B | |
| 29 | DI6 | SRV-ON | อินพุตเปิดใช้งานเซอร์โว | 49 | B- | เอาต์พุต การเปลี่ยนแปลงการเคลื่อนที่ | ||
| 30 | DI7 | CL | อินพุตล้างเครื่องนับค่าคลาดเคลื่อน | 23 | Z+ | เอาต์พุต การเปลี่ยนแปลงการเคลื่อนที่ | เอาต์พุตแบ่งความถี่ของเอ็นโค้ดเดอร์ เฟส Z | |
| 31 | DI8 | A-CLR | อินพุตล้างสัญญาณเตือน | 24 | Z- | เอาต์พุต การเปลี่ยนแปลงการเคลื่อนที่ | ||
| 32 | DI9 | C-MODE | อินพุตสลับโหมดควบคุม | 25 | GND | GND | สายดินภายใน | |
| 33 | DI10 | INH | ยับยั้งสัญญาณ | 19 | OCZ | เอาต์พุตเฟส Z | เอาต์พุตเฟส Z (Output แบบเปิดวงจรขาคอลเลคเตอร์) | |
| 11 | DO1+ | BRK-OFF+ | เอาต์พุตปลดเบรกภายนอก | 20 | GND | GND | สายดินภายใน | |
| 10 | DO1- | BRK-OFF- | 50 | สายดินโล่กำบัง FG | FG | — | ||
| 35 | DO2+ | SRDY+ | เอาต์พุตพร้อมเซอร์โว | ปลอก | — | FG | การต่อสายดินเฟรม | |
| 34 | DO2- | SRDY- |
E-DHAS□□E-F
สำหรับใช้กับประเภท EtherCAT

รหัสรุ่น: E-SCS1-26PIN-1
ฟังก์ชั่นขาพินของหางปลา SCSI 26PIN
 | ขาพิน | นิยามขาพิน | ฟังก์ชั่นเริ่มต้น | คำอธิบายฟังก์ชั่น | |
| 6 | DI-COM | อินพุต | จุดร่วมอินพุตอเนกประสงค์ | ||
| 5 | DI1 | ไม่มีการกำหนดค่า | อินพุตอเนกประสงค์ 1 | ||
| 7 | DI2 | POT | อินพุตห้ามขับเดินหน้า | ||
| 8 | DI3 | NOT | อินพุตห้ามชุดขับมอเตอร์หมุนย้อนกลับ | ||
| 9 | DI4 | HOME-SWITCH | อินพุตสลับโฮม | ||
| 10 | DI5 | ไม่มีการกำหนดค่า | อินพุตอเนกประสงค์ 5 | ||
| 11 | DI6 | ไม่มีการกำหนดค่า | อินพุตอเนกประสงค์ 6 | ||
| 12 | DI7 | ไม่มีการกำหนดค่า | อินพุตอเนกประสงค์ 7 | ||
| 13 | DI8 | ไม่มีการกำหนดค่า | อินพุตอเนกประสงค์ 8 | ||
| 1 | DO1+ | BRK-OFF+ | เอาต์พุตสัญญาณปลดเบรกภายนอก | ||
| 2 | DO1- | BRK-OFF- | |||
| 25 | DO2+ | SRDY+ | เอาต์พุตสัญญาณเซอร์โวพร้อมทำงาน | ||
| 26 | DO2- | SRDY- | |||
| 3 | DO3+ | ALM+ | เอาต์พุต สัญญาณเตือน | ||
| 4 | DO3- | ALM- | |||
| 17 | A+ | เอาต์พุต การเปลี่ยนแปลงการเคลื่อนที่ | เอาต์พุตแบ่งความถี่ เฟส A | ||
| 18 | A- | เอาต์พุต การเปลี่ยนแปลงการเคลื่อนที่ | |||
| 19 | B+ | เอาต์พุต การเปลี่ยนแปลงการเคลื่อนที่ | เอาต์พุตแบ่งความถี่เฟส B | ||
| 20 | B- | เอาต์พุต การเปลี่ยนแปลงการเคลื่อนที่ | |||
| 21 | Z+ | เอาต์พุต การเปลี่ยนแปลงการเคลื่อนที่ | เอาต์พุตแบ่งความถี่เฟส Z | ||
| 22 | Z- | เอาต์พุต การเปลี่ยนแปลงการเคลื่อนที่ | |||
| 16 | GND | GND | สายดินสัญญาณ | ||
| 14 | AI1- | อนาล็อกอินพุต 1- | อนาล็อกอินพุต 1 | ||
| 15 | AI1+ | อินพุตอนาล็อก 1+ | |||
| 23 | AI2+ | อนาล็อกอินพุต 2+ | อนาล็อกอินพุต 2 | ||
| 24 | AI2- | อนาล็อกอินพุต 2- | |||
| ปลอก | — | FG | การต่อสายดินเฟรม | ||
รุ่น: E-MSTO-2 ความยาว: 2 ม.

| ขาพิน | สัญญาณ | ชื่อ | คำอธิบายฟังก์ชั่น | |
| 1 | 0V | สายดินอ้างอิงของ STO | หากไม่ได้เชื่อมต่อกับอุปกรณ์นิรภัย ให้ใช้สำหรับลัดวงจร SF1 และ SF2 ห้ามใช้สำหรับพาวเวอร์ซัพพลายของอุปกรณ์ภายนอก | |
| 2 | 24V | พาวเวอร์ซัพพลาย STO 24 V | ||
| 3 | SF1- | ขั้วต่ออินพุตลบของสัญญาณควบคุม STO 1 | เมื่อสัญญาณ SF1 หรือ SF2 อยู่ในสถานะ OFF ฟังก์ชันความปลอดภัย STO จะทำงาน | |
| 4 | SF1+ | ขั้วต่อสัญญาณควบคุม STO 1 ขั้วบวก | ||
| 5 | SF2- | ขั้วต่อสัญญาณควบคุม STO 2 ขั้วลบ | ||
| 6 | SF2+ | ขั้วต่อสัญญาณควบคุม STO 2 ขั้วบวก | ||
| 7 | EDM- | การตรวจสอบอุปกรณ์ต่อพ่วง แบบสองขั้ว เอาต์พุต การเปลี่ยนแปลงการเคลื่อนที่ | เมื่อสัญญาณ SF1 หรือสัญญาณ SF2 อยู่ในสถานะปิด สัญญาณ EDM จะถูกตั้งค่าเป็นเปิด | |
| 8 | EDM+ | |||
แผนภาพการเชื่อมต่อสายไฟ STO
